Печатные платы драйверов двигателей обеспечивают точное управление движением в робототехнике, промышленной автоматизации, системах ОВКВ, бытовой технике и промышленном оборудовании, реализуя трехфазные инверторы для BLDC-двигателей, управление шаговыми двигателями, сервоприводы и контроллеры двигателей постоянного тока, обрабатывающие токи от 1А (малые приводы) до 100А+ (промышленные приводы) с частотами переключения 4-50кГц, требующие надежного теплового управления, интеграции интерфейса энкодера и защитных цепей, обеспечивающих надежную работу в течение миллионов циклов пуска-останова двигателя.
В APTPCB мы производим печатные платы драйверов двигателей с опытом в области промышленного управления, реализуя оптимизированные силовые каскады, схемы управления затворами и интерфейсы управления. Наши возможности поддерживают бесщеточные двигатели постоянного тока, шаговые, серво- и двигатели постоянного тока в диапазонах напряжений от 12В (потребительские) до 800В (промышленные приводы) с комплексным функциональным тестированием, подтверждающим производительность управления двигателем.
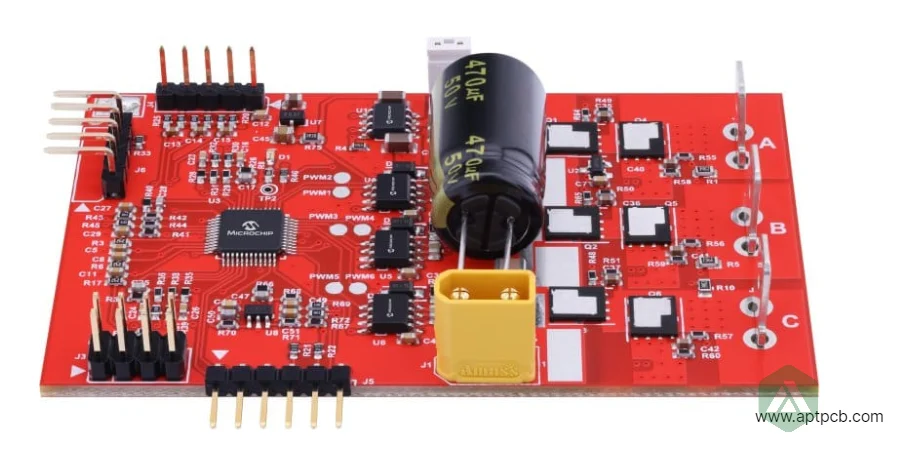
Реализация сильноточных трехфазных силовых каскадов
Драйверы двигателей BLDC требуют трехфазных инверторных мостов, подающих многоамперные токи на обмотки двигателя с точным управлением синхронизацией для достижения эффективной коммутации, плавной подачи крутящего момента и минимального акустического шума. Конструкция силового каскада должна выдерживать непрерывные и пиковые токи, управлять тепловыделением и обеспечивать защиту от перегрузки по току, перенапряжения и сквозных токов.
В APTPCB наше производство реализует надежные силовые каскады, поддерживающие надежную работу двигателя.
Ключевые требования к силовому каскаду
Интеграция силовых полупроводников
- Выбор MOSFET или IGBT на основе требований по напряжению и току, при этом приложения дронов БПЛА требуют компактных высокопроизводительных конструкций
- Шестиключевая трехфазная мостовая конфигурация, обеспечивающая двунаправленное управление током
- Параллельный монтаж устройств для сильноточных приложений, распределяющий тепловые нагрузки
- Оптимизация управления затвором, обеспечивающая быстрое переключение при предотвращении сквозного тока
- Измерение тока с использованием шунтирующих резисторов или датчиков Холла, обеспечивающее обратную связь
- Конструкция теплового интерфейса, поддерживающая температуру перехода в пределах спецификаций
Разводка печатной платы и тепловые характеристики
- Конструкция из толстой меди (3-6oz), обрабатывающая непрерывные фазные токи двигателя
- Широкие дорожки в распределении питания, минимизирующие резистивные потери и падения напряжения
- Массивы тепловых переходных отверстий, передающие тепло от полупроводников к радиаторам
- Размещение компонентов, оптимизирующее распределение тепла и схемы воздушного потока
- Многослойная структура с плоскостями питания, эффективно распределяющими ток
- Тепловое моделирование, подтверждающее температуры в различных рабочих условиях
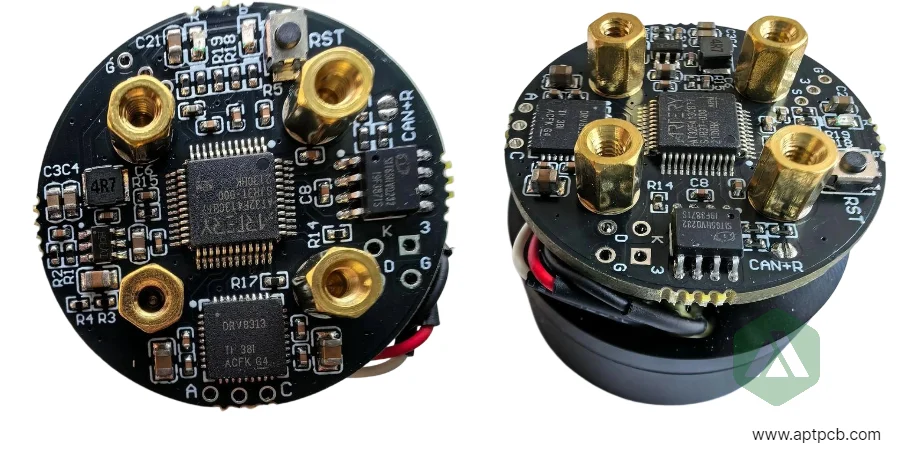
Интеграция интерфейсов энкодера и датчика Холла
Обратная связь по положению двигателя с использованием энкодеров, датчиков Холла или резольверов обеспечивает замкнутое управление, предлагая точное регулирование скорости, контроль положения и управление крутящим моментом. Интерфейсные схемы должны обеспечивать надлежащее возбуждение датчика, кондиционирование сигнала и фильтрацию шума, гарантируя точное измерение положения, несмотря на электромагнитные помехи от переключения двигателя и промышленных сред.
APTPCB производит драйверы двигателей с проверенными схемами интерфейса датчиков.
Ключевая реализация интерфейса
Интеграция датчика Холла
- Возбуждение датчика 5В или 12В с ограничением тока для защиты датчиков
- Кондиционирование цифрового входа с триггерами Шмитта, обеспечивающими помехоустойчивость
- Логика коммутации, генерирующая правильные последовательности переключения из состояний Холла
- Обнаружение неисправностей датчика, выявляющее разомкнутые или закороченные соединения Холла
- Разводка печатной платы, отделяющая цепи датчиков от шумного силового каскада
- Тестовая валидация, подтверждающая правильную работу датчика Холла в различных условиях
Интерфейсные схемы энкодера
- Дифференциальные приемные схемы (RS-422, RS-485) для инкрементальных энкодеров
- Подтягивающие резисторы и фильтрация для несимметричных выходов энкодера
- Высокоскоростной захват входа (>1МГц) для отслеживания положения на максимальных скоростях двигателя
- Обнаружение индексного импульса, обеспечивающее абсолютную привязку положения
- Регулирование питания энкодера, обеспечивающее чистое питание 5В для энкодера
- Защита от ЭСР на входах энкодера, предотвращающая повреждения от статического разряда
Обеспечение защиты и диагностики двигателя
Драйверы двигателей требуют комплексной защиты, предотвращающей повреждения от перегрузки по току (заблокированный ротор, перегрузка), перенапряжения (рекуперативное торможение, переходные процессы питания), пониженного напряжения (условия просадки напряжения) и перегрева (недостаточное охлаждение, экстремальные условия окружающей среды). Реализация защиты должна реагировать в течение микросекунд при неисправностях, избегая ложных срабатываний в нормальных переходных условиях.
APTPCB реализует многоуровневую защиту двигателя, обеспечивающую безопасную работу.
Ключевые функции защиты
Обнаружение перегрузки по току и заклинивания
- Мониторинг фазного тока, обнаруживающий условия перегрузки по току в течение микросекунд
- Обнаружение заклинивания, идентифицирующее заблокированный ротор или условия чрезмерной нагрузки
- Ограничение тока, снижающее напряжение привода при длительной перегрузке
- I²t-защита, интегрирующая ток по времени, предотвращающая тепловые повреждения
- Аппаратное отключение при перегрузке по току, обеспечивающее резервную защиту
- Диагностическая отчетность, сообщающая о неисправностях контроллеру системы
Мониторинг температуры
- Измерение температуры радиатора, обеспечивающее тепловое снижение мощности и отключение
- Вход термистора двигателя, контролирующий температуры обмоток в оборудованных двигателях
- Измерение температуры окружающей среды, компенсирующее параметры управления
- Оценка тепловой модели, прогнозирующая температуры полупроводников
- Прогрессивное снижение мощности, уменьшающее ток при повышенных температурах
- Защита от перегрева, отключающаяся до возникновения повреждений
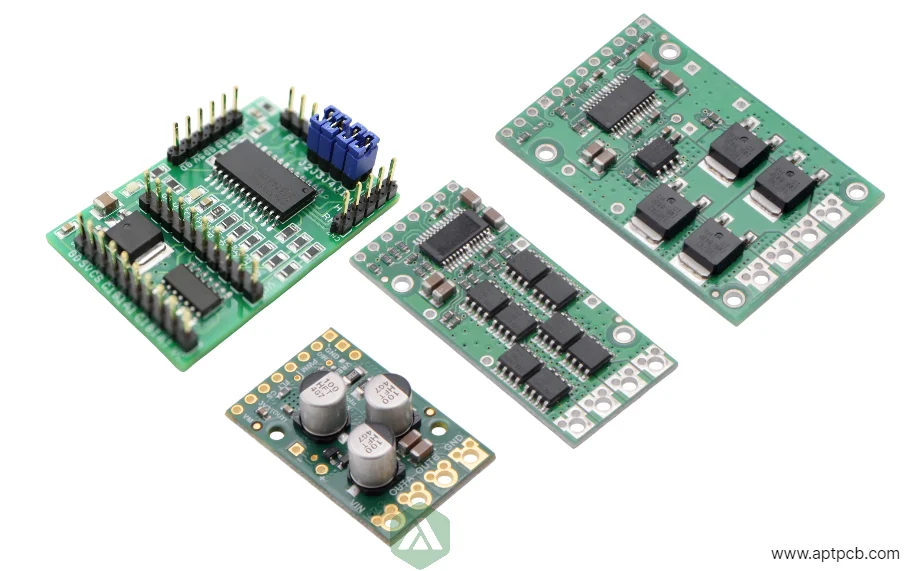
Поддержка разнообразных применений двигателей
Драйверы двигателей используются в таких приложениях, как промышленная автоматизация (конвейеры, насосы, вентиляторы), робототехника (манипуляторы, мобильные роботы, дроны), ОВКВ (компрессоры, воздуходувки), потребительские товары (бытовая техника, электроинструменты) и автомобильная промышленность (ЭУР, ОВКВ, приводы), требующих специфических для приложения оптимизаций в алгоритмах управления, интерфейсах, экологических рейтингах и сертификациях.
APTPCB обеспечивает гибкое производство, поддерживающее разнообразные приложения управления двигателями.
Ключевые требования к применению
Промышленная автоматизация
- Прочная конструкция, выдерживающая заводские условия (-40 до +70°C)
- Интерфейсы связи (EtherCAT, CANopen, Modbus) для заводских сетей
- Режимы управления положением и скоростью, поддерживающие разнообразные потребности автоматизации
- Монтаж на DIN-рейку или шасси для промышленных корпусов
- Высокая надежность (>100 000 часов MTBF), минимизирующая обслуживание
- Промышленные сертификаты (CE, UL508), обеспечивающие глобальные установки
Робототехника и потребительские товары
- Компактный размер и малый вес для приложений с ограниченным пространством
- Работа от батареи, поддерживающая портативные и мобильные платформы
- Эффективная работа, максимизирующая время работы от ограниченной емкости батареи
- Бессенсорные опции управления, снижающие стоимость и сложность
- Функции безопасности (безопасное отключение крутящего момента), соответствующие требованиям коллаборативных роботов
- Оптимизация затрат, обеспечивающая конкурентоспособные цены для потребителей и робототехники
Благодаря оптимизированным для приложений конструкциям и гибкому производству, координируемому с опытом индустрии робототехники, APTPCB позволяет производителям драйверов двигателей обслуживать различные рынки управления движением по всему миру.
Обеспечение реализации алгоритмов управления
Современные драйверы двигателей реализуют сложные алгоритмы управления, включая шестишаговую коммутацию, синусоидальное FOC (векторное управление), бессенсорное управление с использованием измерения противо-ЭДС, а также расширенные функции, такие как подавление пульсаций, снижение акустического шума и адаптивное управление. Реализация требует высокопроизводительных микроконтроллеров или DSP, выполняющих контуры управления на частоте 10-50 кГц, взаимодействуя с силовым каскадом, датчиками и системным контроллером.
APTPCB поддерживает электронику управления двигателями с проверенными процессами сборки.
Интеграция управления
Платформа микроконтроллера
- ARM Cortex-M4/M7 или специализированные микроконтроллеры управления двигателями, обеспечивающие возможности DSP
- Высокоразрешающие ШИМ-выходы (таймеры 200МГц+), обеспечивающие точную коммутацию
- Быстрые АЦП-входы (1-2MSPS) для выборки фазных токов для FOC
- Захват входа энкодера и интерфейсы датчиков Холла для обратной связи по положению
- Периферийные устройства связи (CAN, UART, SPI, I2C) для системной интеграции
- Поддержка разработки прошивки, обеспечивающая клиентские алгоритмы управления
Разработка печатных плат для управления
- Целостность аналогового сигнала, поддерживающая точность измерений для определения тока/напряжения
- Правильное заземление, отделяющее шумную силовую землю от чувствительной аналоговой земли
- Развязка и фильтрация, предотвращающие искажение измерений коммутационным шумом
- Разводка кварцевого генератора, обеспечивающая стабильную синхронизацию для алгоритмов управления
- Доступ к интерфейсу отладки, обеспечивающий разработку и устранение неполадок на месте
- Производственная поддержка, включая программирование и разработку функциональных тестов
Обеспечение экономически эффективного производства
Производство драйверов двигателей должно балансировать производительность, надежность и стоимость, отвечая требованиям конкурентного рынка в потребительских, промышленных и автомобильных приложениях. Оптимизация производства за счет автоматизации, эффективности тестирования и управления цепочками поставок обеспечивает конкурентоспособные цены при сохранении стандартов качества.
APTPCB обеспечивает экономически эффективное производство драйверов двигателей.
Превосходство в производстве
Производственные возможности
- Автоматизированная сборка и тестирование, максимизирующие пропускную способность и согласованность
- Тестирование под нагрузкой двигателя, подтверждающее производительность драйвера с реальными двигателями
- Тестирование тока и температуры, подтверждающее спецификации в номинальных условиях
- Проверка интерфейса связи, подтверждающая работу интерфейсов энкодера, Холла и сети
- Статистический контроль процессов, отслеживающий тенденции качества и обеспечивающий улучшения
- Массовое производство, поддерживающее крупносерийные потребительские и автомобильные программы
Благодаря оптимизированному производству, всестороннему тестированию и управлению качеством, согласованному со стандартами коммуникационного оборудования, APTPCB позволяет производителям драйверов двигателей внедрять надежные решения для управления движением по всему миру.