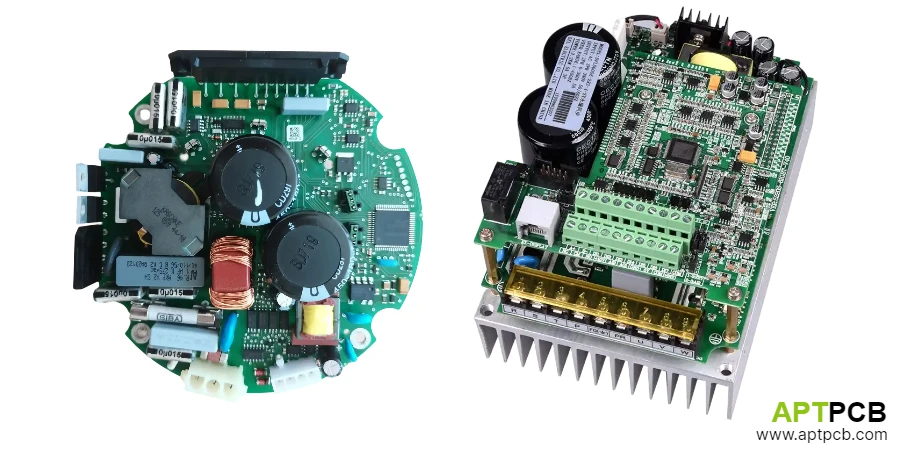
Контроллеры двигателей охватывают спектр от компактных интегрированных модулей до полнофункциональных промышленных приводов, каждый из которых требует конструкции печатной платы, оптимизированной для целевого типа двигателя, диапазона мощности и требований применения. Фундаментальные задачи — эффективность переключения мощности, точность управления, управление температурой и соответствие ЭМС — применимы к этому диапазону с разным акцентом.
В этом руководстве рассматриваются принципы проектирования печатных плат, применимые к контроллерам двигателей в приложениях BLDC, шаговых и асинхронных двигателей переменного тока в промышленных условиях.
В этом руководстве
- Выбор топологии силового каскада
- Интеграция драйвера затвора
- Датчики положения и тока
- Реализация цифрового управления
- Стратегии управления температурой
- Подходы к соблюдению ЭМС
Выбор топологии силового каскада
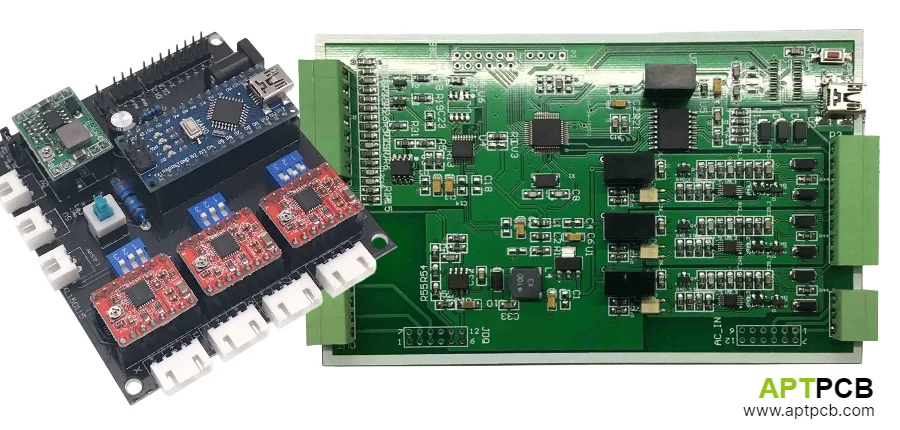
Топология силового каскада контроллера двигателя зависит от типа двигателя, диапазона напряжения и требований к производительности. Трехфазные инверторы обслуживают BLDC и асинхронные двигатели переменного тока; H-мосты или специализированные драйверы управляют шаговыми двигателями; однофазные конфигурации работают для простого управления двигателями постоянного тока. Каждая топология предъявляет свои требования к компоновке печатной платы.
Трехфазные инверторы используют шесть переключающих устройств в конфигурации трехплечевого моста. Силовой каскад может использовать дискретные полевые МОП-транзисторы или БТИЗ, интегрированные силовые модули (IPM) или интеллектуальные силовые модули со встроенными драйверами затвора. Модульные подходы упрощают компоновку при высоких уровнях мощности, в то время как дискретные решения обеспечивают гибкость и оптимизацию затрат для маломощных конструкций.
Для многослойных печатных плат компоновка силового каскада должна минимизировать индуктивность контура шины постоянного тока — паразитную индуктивность на пути от конденсатора шины через пару переключающих устройств и обратно. Каждый наногенри индуктивности контура создает выброс напряжения во время переключения, что нагружает устройства и увеличивает электромагнитные помехи.
Соображения по проектированию топологии
- Трехфазный инвертор: Стандарт для управления двигателями BLDC и переменного тока; шесть переключателей с комплементарным приводом затвора.
- H-мост: Четыре переключателя на фазу; используется для шаговых двигателей или коллекторных двигателей постоянного тока.
- Интегрированные модули: IPM объединяют несколько переключателей с драйверами затвора; упрощают компоновку, но ограничивают тепловую оптимизацию.
- Шина против печатной платы: В мощных конструкциях могут использоваться ламинированные шины вместо меди печатной платы для распределения мощности.
- Требования к демпферу: Зависимый от топологии размер демпфера на основе характеристик устройства и индуктивности компоновки.
- Тормоз/Регенерация: Предусмотрение топологии для рекуперативного торможения или тормозного прерывателя для контролируемого замедления.
Интеграция драйвера затвора
Драйверы затвора преобразуют низковольтные управляющие сигналы в ток привода, необходимый для переключения силовых полупроводников. Уровень интеграции варьируется от дискретных ступеней драйвера до полностью интегрированных интеллектуальных ИС драйвера затвора с функциями защиты и диагностики.
Драйверы затвора верхнего плеча требуют либо изолированных источников питания, либо цепей начальной загрузки, которые получают питание привода затвора от переключаемого выхода. Схемы начальной загрузки обеспечивают меньшую стоимость, но накладывают ограничения на рабочий цикл — конденсатор начальной загрузки заряжается только тогда, когда устройство нижнего плеча проводит ток. Приложения управления двигателем с потенциальным 100% рабочим циклом верхнего плеча (рекуперация или впрыск постоянного тока) могут потребовать изолированных источников питания.
Компоновка печатной платы для драйверов затвора должна минимизировать площадь контура привода затвора, сохраняя при этом изолирующий промежуток. Путь тока привода затвора включает выход драйвера, резистор затвора, выводы затвор-исток и путь возврата. Индуктивность в этом пути вызывает звон и влияет на характеристики переключения.
Проектирование драйвера затвора
- Начальная загрузка против изолированного: Начальная загрузка для стандартного управления двигателем; изолированные источники питания для приложений, требующих проводимости верхнего плеча без периодического переключения нижнего плеча.
- Выбор резистора затвора: Балансирует скорость переключения против звона и электромагнитных помех; отдельные резисторы включения и выключения оптимизируются независимо.
- Зажим Миллера: Активный зажим Миллера или отрицательное смещение затвора предотвращают ложное включение из-за связи dV/dt.
- Защита DESAT: Обнаружение десатурации для БТИЗ обеспечивает быструю защиту от короткого замыкания.
- Согласование распространения: Согласование задержки распространения верхнего и нижнего плеча предотвращает сквозной ток.
- Генерация мертвого времени: Аппаратная вставка мертвого времени как резерв для программного программирования мертвого времени.
Датчики положения и тока
Алгоритмы управления двигателем требуют точной обратной связи по положению и току. Датчики положения используют датчики Холла для шестиступенчатого управления BLDC, оптические или магнитные энкодеры для векторного управления или бессенсорные методы, оценивающие положение по обратной ЭДС или сигнатурам тока. Датчики тока обеспечивают управление крутящим моментом и защиту от перегрузки по току.
Интерфейсы датчиков Холла принимают низковольтные цифровые сигналы от датчиков, установленных в двигателе. Печатная плата должна согласовывать эти сигналы с учетом наводок шума от кабелей двигателя и переключения мощности. Дифференциальная передача или согласование сигнала на двигателе снижает восприимчивость к шуму для длинных кабельных трасс.
Требования к точности датчиков тока зависят от подхода к управлению. Шестиступенчатое управление BLDC допускает точность датчиков тока ±5%, в то время как высокопроизводительное векторное управление выигрывает от точности ±1%. Датчики на основе шунта с изолированными усилителями достигают этой точности при меньших затратах, чем датчики тока на эффекте Холла, при этом процессы тестирования и контроля качества гарантируют точность калибровки датчиков.
Реализация датчиков
- Интерфейс датчика Холла: Входы триггера Шмитта с фильтрацией для помехоустойчивости; подтягивающие резисторы, рассчитанные на длину кабеля.
- Интерфейс энкодера: Дифференциальные линейные приемники для инкрементальных энкодеров; последовательный интерфейс для абсолютных энкодеров.
- Размещение токового шунта: Шунт звена постоянного тока измеряет общий ток; шунты плеча позволяют восстанавливать фазный ток.
- Изолированные усилители: Усиленный рейтинг изоляции для усилителей, измеряющих токи верхнего плеча.
- Время выборки: Выборка АЦП синхронизирована с ШИМ для измерения в периоды стабильного тока.
- Бессенсорные методы: Обнаружение перехода через ноль обратной ЭДС или высокочастотная инжекция для оценки положения.
Реализация цифрового управления
Цифровое управление двигателем выполняется на микроконтроллерах или ЦСП со специализированной периферией для генерации ШИМ, синхронизации АЦП и обработки энкодера. Печатная плата должна поддерживать эти функции, минимизируя наводки шума от силовых каскадов на цифровые схемы.
Генерация ШИМ требует аппаратных таймеров с функциями дополнительных выходов, вставки мертвого времени и синхронизированного запуска АЦП. ШИМ с выравниванием по центру снижает пульсации тока и позволяет проводить выборку в середине несущей для точного измерения тока. Разрешение ШИМ и выбор частоты несущей влияют на достижимую полосу пропускания управления и слышимый шум.
Выполнение алгоритма управления происходит в течение периода цикла ШИМ — обычно 50-100 мкс для ШИМ 10-20 кГц. Полная последовательность выборки АЦП, расчета управления и обновления ШИМ должна завершиться в этом окне с детерминированным временем. Конструкции печатных плат промышленного управления должны поддерживать требования к производительности в реальном времени.
Архитектура цифрового управления
- Выбор процессора: ЦСП управления двигателем или МКУ со встроенными периферийными устройствами ШИМ, АЦП и энкодера.
- Периферия ШИМ: Аппаратное обеспечение поддерживает дополнительные выходы, программируемое мертвое время, входы неисправности и триггеры АЦП.
- Производительность АЦП: Разрешение минимум 12 бит; время преобразования 1-2 мкс для приложений токовой петли.
- Аппаратное обеспечение энкодера: Квадратурный декодер считает без вмешательства программного обеспечения; функция захвата ставит временные метки на индексные импульсы.
- Интерфейс связи: CAN, Ethernet или полевая шина для ввода команд и диагностики.
- Сторожевой таймер и неисправность: Аппаратный сторожевой таймер и входы неисправности, отключающие ШИМ независимо от программного обеспечения.
Стратегии управления температурой
Контроллеры двигателей рассеивают мощность при переключении и потерях проводимости, которые изменяются в зависимости от нагрузки и частоты переключения. Тепловой дизайн должен справляться как с непрерывной работой при номинальной нагрузке, так и с условиями переходной перегрузки во время запуска или ускорения двигателя.
Монтаж силовых полупроводников определяет тепловое сопротивление от перехода к окружающей среде. Устройства, установленные на печатной плате, полагаются на распределение меди и тепловые переходные отверстия для отвода тепла; конструкции с более высокой мощностью монтируют устройства на радиаторы или охлаждающие пластины с термоинтерфейсным материалом. Тепловой дизайн печатной платы должен обеспечивать адекватные тепловые пути в рамках ограничений компоновки.
Контроллеры двигателей часто работают в замкнутых пространствах — корпусах двигателей, шкафах оборудования или отсеках транспортных средств — где температура окружающей среды может достигать 85°C или выше. Выбор компонентов и тепловой дизайн должны учитывать эту повышенную температуру окружающей среды, сохраняя надежную работу.
Элементы теплового дизайна
- Путь теплового сопротивления: Проектируйте тепловое сопротивление переход-окружающая среда в соответствии с рассеиваемой мощностью и температурными пределами.
- Вес меди: 2-4 унции меди в силовых зонах для передачи тока и теплового распределения.
- Массивы тепловых переходных отверстий: Массивы переходных отверстий под силовыми корпусами снижают тепловое сопротивление к внутренним слоям.
- Интеграция радиатора: Мощные конструкции монтируют полупроводники на внешние радиаторы через термоинтерфейсный материал.
- Датчик температуры: Термисторы NTC рядом с силовыми устройствами обеспечивают тепловую защиту.
- Определение снижения номинальных характеристик: Четкая спецификация пропускной способности по току в зависимости от температуры окружающей среды.
Подходы к соблюдению ЭМС
Контроллеры двигателей генерируют электромагнитные помехи от высокочастотного переключения и излучают через кабели двигателя, действующие как антенны. Соблюдение требований ЭМС включает в себя методы фильтрации, экранирования и компоновки, скоординированные между силовым каскадом, цепями управления и системными соединениями.
Фильтрация кондуктивных помех на входе постоянного тока использует синфазные дроссели и дифференциальные конденсаторы для ослабления помех от переключения ШИМ. Конструкция фильтра должна обеспечивать требуемое затухание при обработке тока двигателя без насыщения. Процессы тестирования ЭМС проверяют эффективность фильтра во всем рабочем диапазоне.
Излучение кабеля двигателя зависит от скорости фронта переключения, длины кабеля и экранирования. Выходные фильтры (фильтры dV/dt или синусоидальной волны) замедляют переходы выходного напряжения для уменьшения высокочастотного содержания. Эти фильтры также защищают изоляцию двигателя от скачков напряжения, возникающих при большой длине кабеля.
Подходы к проектированию ЭМС
- Фильтрация входа: Многоступенчатая синфазная и дифференциальная фильтрация на входе постоянного или переменного тока.
- Управление выходным dV/dt: Фильтры dV/dt ограничивают скорость нарастания выходного напряжения; уменьшают подшипниковые токи двигателя и электромагнитные помехи.
- Экранирование кабеля: Экранированные кабели двигателя с надлежащим окончанием уменьшают излучаемые помехи.
- Выбор частоты ШИМ: Избегайте частот ШИМ, создающих помехи на чувствительных частотах приемника.
- Расширенный спектр: ШИМ с расширенным спектром снижает пиковые помехи на частоте ШИМ и гармониках.
- Целостность плоскости заземления: Непрерывные плоскости заземления минимизируют площади контуров и контролируют пути возврата.
Резюме
Проектирование печатной платы контроллера двигателя балансирует эффективность управления мощностью, точность управления, управление температурой и соответствие ЭМС в приложениях от компактных встроенных приводов до полнофункциональных промышленных контроллеров. Фундаментальные принципы применимы независимо от масштаба — минимизация индуктивности контура переключения, поддержание целостности сигнала для обнаружения и управления и управление тепловыми путями для надежной работы. Детали реализации варьируются в зависимости от уровня мощности, типа двигателя и требований приложения, но успешные конструкции объединяет внимание к этим основным инженерным проблемам.