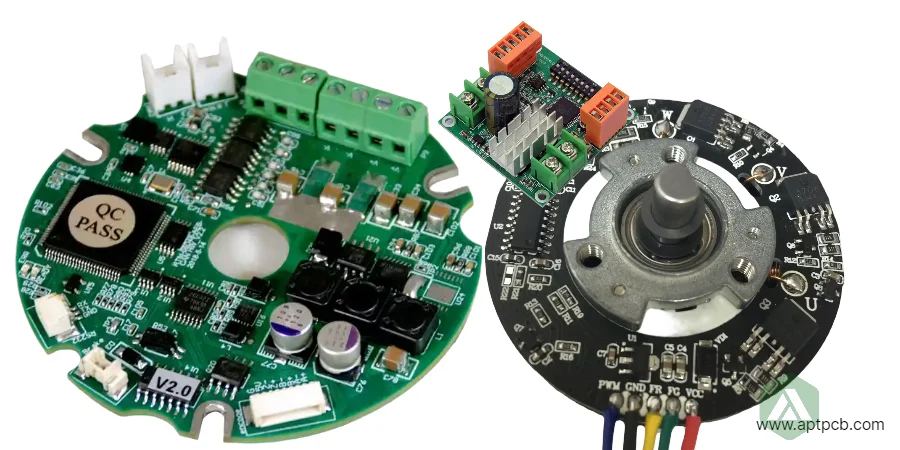
Gli assemblaggi di driver per motori BLDC implementano algoritmi di controllo sofisticati, inclusa la commutazione a sei fasi, il controllo vettoriale sinusoidale (FOC) e il funzionamento sensorless tramite rilevamento della forza controelettromotrice (back-EMF), raggiungendo un'elevata efficienza (>95%), un'erogazione di coppia fluida e una regolazione precisa della velocità in droni (quadricotteri, ad ala fissa), utensili elettrici (trapani, seghe, smerigliatrici), elettrodomestici (ventilatori, pompe, compressori) e automazione industriale che richiedono un funzionamento affidabile del motore brushless, gestendo correnti da 1 a 100A+ attraverso milioni di cicli di avvio-arresto.
In APTPCB, forniamo servizi specializzati di assemblaggio di driver BLDC che implementano algoritmi di controllo avanzati, stadi di potenza ad alta corrente e funzionalità di protezione complete con standard di qualità aerospaziale e difesa. Le nostre capacità supportano applicazioni BLDC da 12V a 800V su gamme di potenza da 50W per il consumo a oltre 50kW per azionamenti industriali con implementazione validata di algoritmi sensorless e FOC.
Implementazione del controllo vettoriale (FOC)
Il controllo orientato al campo trasforma le correnti trifase in un sistema di riferimento rotante, consentendo il controllo indipendente delle componenti di corrente che producono coppia e magnetizzanti, ottenendo prestazioni superiori rispetto alla commutazione a sei passi: coppia fluida su tutto il range di velocità, rumore acustico ridotto, maggiore efficienza e controllo preciso della coppia. Il FOC richiede microcontrollori ad alte prestazioni che eseguono complesse trasformazioni matematiche (Clarke, Park, Park inverso) a velocità di loop di controllo di 10-50 kHz.
Presso APTPCB, i nostri servizi di assemblaggio supportano driver motore compatibili FOC con implementazioni di controllo validate.
Requisiti chiave per l'implementazione del FOC
Esecuzione dell'algoritmo di controllo
- MCU ARM Cortex-M4/M7 con capacità DSP e floating-point che eseguono algoritmi FOC con affidabilità da dispositivi medici per applicazioni critiche
- Modulazione a vettore spaziale (SVM) che genera pattern PWM ottimali massimizzando l'utilizzo del bus DC
- Loop di controllo della corrente PI che regolano le correnti Id e Iq per ottenere la coppia desiderata
- Stima di posizione/velocità utilizzando anelli ad aggancio di fase o osservatori a modo scorrevole
- Trasformazioni di coordinate (Clarke, Park) che convertono tra sistemi di riferimento
- PWM ad alta risoluzione (timer >200MHz) che realizza una sintesi precisa del vettore di tensione
Misurazione e rilevamento della corrente
- Rilevamento della corrente trifase utilizzando resistori shunt o sensori ad effetto Hall
- Campionamento ADC ad alta velocità (1-2 MSPS) che cattura le correnti di fase istantanee
- Campionamento sincrono allineato con PWM per una ricostruzione accurata della corrente
- Amplificazione e filtraggio che ottimizzano il rapporto segnale/rumore in un ambiente motore rumoroso
- Rilevamento di sovracorrente che protegge lo stadio di potenza durante condizioni di guasto
- Calibrazione e compensazione dell'offset che mantengono la precisione su tutta la temperatura
Esecuzione di algoritmi di controllo sensorless
Il controllo BLDC sensorless elimina i sensori di Hall o gli encoder, riducendo i costi, migliorando l'affidabilità e consentendo il funzionamento del motore in ambienti difficili. Il rilevamento della forza controelettromotrice (FCEM) rileva i punti di passaggio per lo zero, determinando la posizione del rotore e consentendo una corretta temporizzazione della commutazione. Il funzionamento sensorless richiede algoritmi di avvio sofisticati che passano dall'accelerazione ad anello aperto, attraverso la soglia di rilevamento della FCEM, al controllo sensorless ad anello chiuso.
APTPCB produce driver BLDC sensorless con implementazioni di algoritmi validate.
Implementazione chiave sensorless
Metodi di rilevamento della FCEM
- Rilevamento del passaggio per lo zero che monitora la tensione di fase non pilotata rispetto al punto neutro
- Comparatore e filtraggio che estraggono gli eventi di passaggio per lo zero da segnali rumorosi
- Regolazione della temporizzazione della commutazione che ottimizza l'efficienza su velocità e carico
- Monitoraggio dell'ampiezza della FCEM che convalida la precisione della posizione del rotore e rileva i guasti
- Filtraggio hardware e software che previene falsi trigger dal rumore di commutazione
- Algoritmi adattivi che compensano le variazioni dei parametri del motore e la temperatura
Controllo di avvio e transizione
- Avvio ad anello aperto utilizzando il controllo I-f che aumenta la frequenza con corrente costante
- Fase di allineamento che stabilisce una posizione nota del rotore prima della rotazione
- Profilo di accelerazione che aumenta gradualmente la velocità fino a quando la contro-EMF è rilevabile
- Transizione fluida da anello aperto ad anello chiuso evitando discontinuità di coppia
- Algoritmi di "catch and spin" che rilevano e si sincronizzano con motori già in rotazione
- Rilevamento e recupero dello stallo che riavviano il motore se la sincronizzazione viene persa
Ottimizzazione per applicazioni ad alte prestazioni
Le applicazioni BLDC ad alte prestazioni, inclusi droni da corsa, utensili elettrici e servodrive, richiedono la massima densità di potenza, una risposta dinamica rapida e un funzionamento efficiente, necessitando di un design ottimizzato dello stadio di potenza, algoritmi di controllo avanzati e una gestione termica completa per ottenere un funzionamento continuo alla potenza nominale senza declassamento.
APTPCB implementa driver BLDC ad alte prestazioni che supportano applicazioni esigenti.
Caratteristiche ad alte prestazioni
Ottimizzazione dello stadio di potenza
- MOSFET a basso Rds(on) che minimizzano le perdite di conduzione a correnti elevate
- Commutazione rapida (10-50kHz) che riduce l'ondulazione di coppia e il rumore acustico
- Configurazioni di dispositivi in parallelo che distribuiscono correnti elevate riducendo lo stress termico
- Ottimizzazione del tempo morto che minimizza le perdite di conduzione del diodo di corpo
- Raddrizzamento sincrono durante la rigenerazione che recupera energia durante la decelerazione
- Gestione termica che mantiene temperature di giunzione sicure durante i picchi di potenza
Miglioramento della risposta dinamica
- Anelli di controllo della corrente ad alta larghezza di banda (>5kHz) per una risposta rapida della coppia
- Controllo feed-forward che compensa i cambiamenti di carico prevedibili
- Tecniche anti-windup che prevengono la saturazione dell'integratore durante i transitori
- Compensazione della tensione che regola il controllo in base alle variazioni di tensione della batteria
- Algoritmi adattivi che apprendono le caratteristiche del motore ottimizzando le prestazioni
- Interfacce di telemetria e messa a punto che consentono l'ottimizzazione e la diagnostica sul campo
Fornire funzionalità di protezione e sicurezza
I driver BLDC richiedono una protezione completa per prevenire danni al motore e al driver da sovracorrente (rotore bloccato, sovraccarico), sovratensione (sovratensione rigenerativa), sottotensione (esaurimento della batteria), sovratemperatura (raffreddamento insufficiente) e guasti al motore (fase aperta, cortocircuito). La protezione deve rispondere rapidamente evitando falsi allarmi durante il normale funzionamento.
APTPCB implementa una protezione BLDC multistrato che garantisce un funzionamento sicuro.
Implementazione della protezione
Protezione da sovracorrente e stallo
- Spegnimento hardware per sovracorrente che risponde in microsecondi
- Limitazione software della corrente che riduce la potenza durante un sovraccarico prolungato
- Rilevamento dello stallo che identifica il rotore bloccato e attiva lo spegnimento
- Modello termico I²t che previene danni termici da sovracorrenti transitorie
- Monitoraggio della corrente di fase che rileva fasi motore aperte o in cortocircuito
- Codici diagnostici che identificano condizioni di guasto specifiche a supporto della risoluzione dei problemi
Gestione della batteria e termica
- Interruzione per sottotensione che protegge le batterie LiPo dai danni da scarica eccessiva
- Protezione da sovratensione durante la frenata rigenerativa per prevenire la sovratensione del bus
- Controllo attivo del resistore di frenatura che dissipa l'energia rigenerativa quando necessario
- Monitoraggio della temperatura e declassamento che riduce la potenza a temperature elevate
- Spegnimento termico che previene danni ai componenti dovuti al surriscaldamento
- Monitoraggio delle celle della batteria in coordinamento con i sistemi BMS nelle applicazioni equipaggiate
Supporto per diverse applicazioni BLDC
I driver BLDC servono applicazioni che includono droni e UAV (multirotori, ad ala fissa), utensili elettrici (trapani a batteria, avvitatori a impulsi), elettrodomestici (ventilatori, pompe, aspirapolvere) ed e-mobility (e-bike, e-scooter, skateboard elettrici) che richiedono ottimizzazioni specifiche per l'applicazione in algoritmi di controllo, interfacce, livelli di potenza e specifiche ambientali.
APTPCB offre una produzione BLDC flessibile che supporta diverse applicazioni.
Ottimizzazione specifica per l'applicazione
Applicazioni per droni e UAV
- Peso ultraleggero che minimizza l'impatto sul carico utile massimizzando il tempo di volo
- Elevata densità di potenza (>100W/cm³) che consente un'integrazione ESC compatta
- Risposta rapida dell'acceleratore (<10ms) che supporta manovre di volo aggressive
- Coppia fluida che minimizza le vibrazioni che influenzano il controllo di volo e la telecamera
- Interfacce di telemetria (PWM, DShot, UART) che comunicano con i controllori di volo
- Rivestimento conforme impermeabile che resiste al funzionamento esterno in qualsiasi condizione atmosferica
Utensili elettrici ed elettrodomestici
- Ottimizzazione dei costi per soddisfare i prezzi competitivi dell'elettronica di consumo
- Compatibilità della batteria che supporta varie chimiche delle celle (Li-ion, NiMH, NiCd)
- Avvio graduale che riduce lo stress meccanico su cambio e motore
- Freno elettronico che arresta rapidamente il motore per sicurezza e comodità
- Gestione termica che resiste al funzionamento sostenuto ad alta potenza
- Conformità normativa (CE, FCC, UL) che consente l'accesso al mercato globale
Attraverso design ottimizzati per l'applicazione, produzione flessibile e test completi coordinati con gli standard di qualità dei data center server, APTPCB consente ai produttori di driver BLDC di servire diversi mercati di consumo, industriali e specializzati in tutto il mondo.
Abilitare la produzione in volume
La produzione di driver BLDC per l'elettronica di consumo e i droni richiede una capacità di produzione ad alto volume che raggiunga costi competitivi mantenendo prestazioni e affidabilità. L'ottimizzazione della produzione attraverso l'automazione, l'efficienza dei test e la gestione della catena di approvvigionamento consente la produzione in volume a supporto di prodotti di successo per il mercato di massa.
APTPCB offre la produzione di driver BLDC ad alto volume.
Eccellenza nella produzione di volume
Capacità di produzione
- Assemblaggio automatizzato che gestisce componenti a passo fine e posizionamento preciso
- Test di carico del motore per la convalida delle prestazioni del driver con motori BLDC reali
- Test funzionali per la verifica degli algoritmi di controllo, della protezione e delle interfacce
- Test ambientali che confermano il funzionamento in intervalli di temperatura e umidità
- Controllo statistico di processo per il monitoraggio della qualità e il miglioramento continuo
- Impronta produttiva globale a supporto delle esigenze dei clienti regionali
Attraverso capacità di produzione ad alto volume, test completi e gestione della qualità coordinata con gli standard delle apparecchiature di sicurezza, APTPCB consente ai produttori di driver BLDC di implementare soluzioni di controllo motore brushless economiche e ad alte prestazioni nei mercati globali competitivi.