I PCB per driver motore consentono un controllo preciso del movimento in robotica, automazione industriale, sistemi HVAC, elettrodomestici e macchinari industriali, implementando inverter trifase per motori BLDC, controllo di motori passo-passo, servoazionamenti e controllori di motori DC che gestiscono correnti da 1A (piccoli attuatori) a oltre 100A (azionamenti industriali) con frequenze di commutazione di 4-50kHz, richiedendo una robusta gestione termica, l'integrazione dell'interfaccia encoder e circuiti di protezione che garantiscono un funzionamento affidabile attraverso milioni di cicli di avvio-arresto del motore.
In APTPCB, produciamo PCB per driver motore con esperienza nel controllo industriale, implementando stadi di potenza ottimizzati, circuiti di gate drive e interfacce di controllo. Le nostre capacità supportano motori DC brushless, passo-passo, servo e DC su gamme di tensione da 12V (consumer) a 800V (azionamenti industriali) con test funzionali completi che convalidano le prestazioni di controllo del motore.
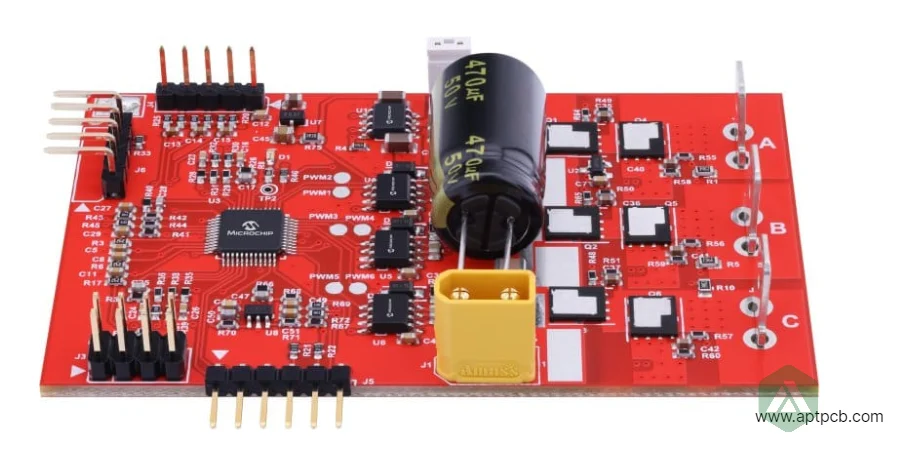
Implementazione di stadi di potenza trifase ad alta corrente
I driver per motori BLDC richiedono ponti inverter trifase che erogano correnti di multi-ampere agli avvolgimenti del motore con un controllo di temporizzazione preciso, per ottenere una commutazione efficiente, un'erogazione di coppia fluida e un rumore acustico minimo. La progettazione dello stadio di potenza deve gestire correnti continue e di picco, gestire la dissipazione termica e fornire protezione contro sovracorrente, sovratensione e guasti da shoot-through.
Presso APTPCB, la nostra produzione implementa stadi di potenza robusti che supportano un funzionamento affidabile del motore.
Requisiti Chiave dello Stadio di Potenza
Integrazione dei Semiconduttori di Potenza
- Selezione di MOSFET o IGBT basata sui requisiti di tensione e corrente, con applicazioni per droni UAV che richiedono design compatti ad alte prestazioni
- Configurazione a ponte trifase a sei interruttori che consente il controllo bidirezionale della corrente
- Montaggio parallelo dei dispositivi per applicazioni ad alta corrente distribuendo i carichi termici
- Ottimizzazione del gate drive che consente una commutazione rapida prevenendo al contempo lo shoot-through
- Rilevamento della corrente tramite resistori shunt o sensori di Hall che fornisce feedback
- Progettazione dell'interfaccia termica mantenendo le temperature di giunzione entro le specifiche
Layout PCB e Termica
- Costruzione in rame pesante (3-6oz) che gestisce correnti di fase motore continue
- Tracce larghe nella distribuzione di potenza minimizzando le perdite resistive e le cadute di tensione
- Array di via termici che trasferiscono il calore dai semiconduttori ai dissipatori di calore
- Posizionamento dei componenti che ottimizza la distribuzione termica e i modelli di flusso d'aria
- Stackup multistrato con piani di alimentazione che distribuiscono la corrente in modo efficiente
- Simulazione termica che convalida le temperature in tutte le condizioni operative
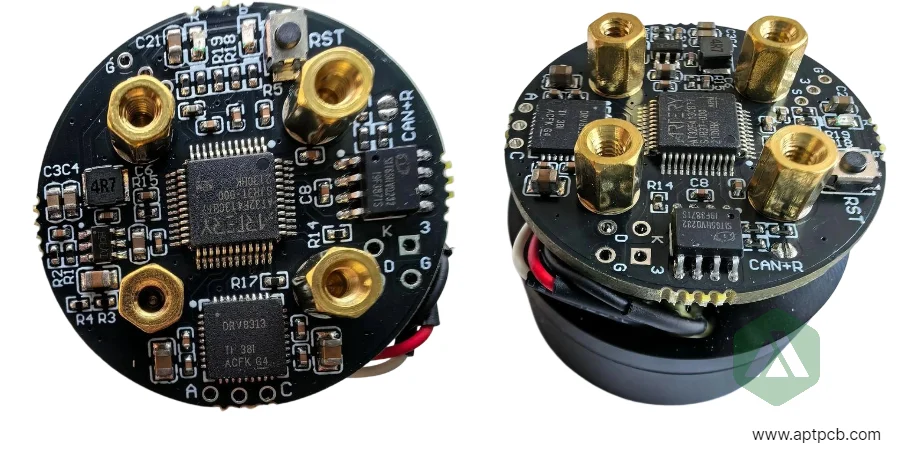
Integrazione delle interfacce di encoder e sensore Hall
Il feedback di posizione del motore che utilizza encoder, sensori Hall o resolver consente un controllo a circuito chiuso che fornisce una regolazione precisa della velocità, un controllo della posizione e una gestione della coppia. I circuiti di interfaccia devono fornire un'adeguata eccitazione del sensore, condizionamento del segnale e filtraggio del rumore, garantendo una misurazione accurata della posizione nonostante le interferenze elettromagnetiche derivanti dalla commutazione del motore e dagli ambienti industriali.
APTPCB produce driver per motori con circuiti di interfaccia sensore convalidati.
Implementazione chiave dell'interfaccia
Integrazione del sensore Hall
- Eccitazione del sensore a 5V o 12V con limitazione di corrente per la protezione dei sensori
- Condizionamento dell'ingresso digitale con trigger di Schmitt che fornisce immunità al rumore
- Logica di commutazione che genera sequenze di commutazione appropriate dagli stati Hall
- Rilevamento di guasti del sensore che identifica connessioni Hall aperte o in cortocircuito
- Layout PCB che separa i circuiti del sensore dallo stadio di potenza rumoroso
- Validazione tramite test che conferma il corretto funzionamento del sensore Hall in tutte le condizioni
Circuiti di interfaccia encoder
- Circuiti ricevitore differenziali (RS-422, RS-485) per encoder incrementali
- Resistenze di pull-up e filtraggio per uscite encoder single-ended
- Acquisizione di ingresso ad alta velocità (>1MHz) per il tracciamento della posizione alle massime velocità del motore
- Rilevamento dell'impulso di indice che consente un riferimento di posizione assoluta
- Regolazione dell'alimentazione dell'encoder che fornisce alimentazione pulita a 5V all'encoder
- Protezione ESD sugli ingressi dell'encoder che previene danni da scariche statiche
Fornitura di protezione e diagnostica del motore
I driver del motore richiedono una protezione completa per prevenire danni da sovracorrente (rotore bloccato, sovraccarico), sovratensione (frenata rigenerativa, transitori di alimentazione), sottotensione (condizioni di brownout) e sovratemperatura (raffreddamento insufficiente, condizioni ambientali estreme). L'implementazione della protezione deve rispondere entro microsecondi durante i guasti, evitando falsi scatti durante le normali condizioni transitorie.
APTPCB implementa una protezione motore multistrato garantendo un funzionamento sicuro.
Caratteristiche chiave di protezione
Rilevamento di sovracorrente e stallo
- Monitoraggio della corrente di fase che rileva le condizioni di sovracorrente entro microsecondi
- Rilevamento di stallo che identifica rotore bloccato o condizioni di carico eccessivo
- Limitazione di corrente che riduce la tensione di azionamento durante un sovraccarico prolungato
- Protezione I²t che integra la corrente nel tempo prevenendo danni termici
- Spegnimento hardware per sovracorrente che fornisce protezione di backup
- Rapportistica diagnostica che comunica le condizioni di guasto al controllore di sistema
Monitoraggio della temperatura
- Rilevamento della temperatura del dissipatore di calore che consente il declassamento termico e lo spegnimento
- Ingresso termistore motore che monitora le temperature degli avvolgimenti nei motori equipaggiati
- Misurazione della temperatura ambiente che compensa i parametri di controllo
- Stima del modello termico che prevede le temperature dei semiconduttori
- Derating progressivo che riduce la corrente a temperature elevate
- Protezione contro il surriscaldamento che spegne prima che si verifichino danni
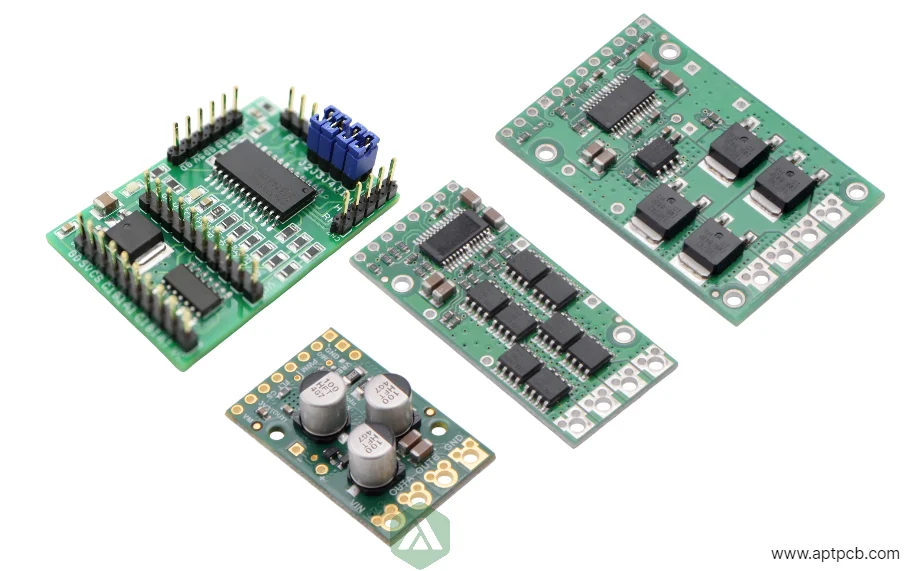
Supporto per diverse applicazioni motoristiche
I driver per motori servono applicazioni che includono automazione industriale (nastri trasportatori, pompe, ventilatori), robotica (manipolatori, robot mobili, droni), HVAC (compressori, soffianti), prodotti di consumo (elettrodomestici, utensili elettrici) e automotive (EPS, HVAC, attuatori) che richiedono ottimizzazioni specifiche per l'applicazione in algoritmi di controllo, interfacce, classificazioni ambientali e certificazioni.
APTPCB offre una produzione flessibile che supporta diverse applicazioni di controllo motori.
Requisiti chiave delle applicazioni
Automazione industriale
- Costruzione robusta che resiste agli ambienti di fabbrica (-40 a +70°C)
- Interfacce di comunicazione (EtherCAT, CANopen, Modbus) per reti di fabbrica
- Modalità di controllo di posizione e velocità che supportano diverse esigenze di automazione
- Montaggio su guida DIN o telaio per contenitori industriali
- Elevata affidabilità (>100.000 ore MTBF) che minimizza la manutenzione
- Certificazioni industriali (CE, UL508) che consentono installazioni globali
Robotica e prodotti di consumo
- Dimensioni compatte e peso leggero per applicazioni con spazio limitato
- Funzionamento a batteria che supporta piattaforme portatili e mobili
- Funzionamento efficiente che massimizza l'autonomia da una capacità di batteria limitata
- Opzioni di controllo sensorless che riducono costi e complessità
- Funzionalità di sicurezza (arresto di coppia sicuro) che soddisfano i requisiti dei robot collaborativi
- Ottimizzazione dei costi per ottenere prezzi competitivi per i consumatori e la robotica
Attraverso design ottimizzati per l'applicazione e una produzione flessibile coordinata con l'esperienza dell'industria della robotica, APTPCB consente ai produttori di driver per motori di servire diversi mercati di controllo del movimento in tutto il mondo.
Abilitazione dell'implementazione dell'algoritmo di controllo
I moderni driver per motori implementano algoritmi di controllo sofisticati, inclusa la commutazione a sei passi, il FOC sinusoidale (controllo orientato al campo), il controllo sensorless utilizzando il rilevamento della contro-EMF e funzionalità avanzate come l'anti-cogging, la riduzione del rumore acustico e il controllo adattivo. L'implementazione richiede microcontrollori o DSP ad alte prestazioni che eseguono cicli di controllo a 10-50 kHz interfacciandosi con lo stadio di potenza, i sensori e il controller di sistema.
APTPCB supporta l'elettronica di controllo motori con processi di assemblaggio validati.
Integrazione del controllo
Piattaforma Microcontrollore
- ARM Cortex-M4/M7 o MCU di controllo motore dedicate che forniscono capacità DSP
- Uscite PWM ad alta risoluzione (timer 200MHz+) che consentono una commutazione precisa
- Ingressi ADC veloci (1-2MSPS) che campionano le correnti di fase per il FOC
- Acquisizione dell'ingresso dell'encoder e interfacce del sensore Hall per il feedback di posizione
- Periferiche di comunicazione (CAN, UART, SPI, I2C) per l'integrazione di sistema
- Supporto allo sviluppo firmware che abilita algoritmi di controllo specifici del cliente
Progettazione PCB per il controllo
- Integrità del segnale analogico che mantiene l'accuratezza della misurazione per il rilevamento di corrente/tensione
- Messa a terra adeguata che separa la massa di alimentazione rumorosa dalla massa analogica sensibile
- Disaccoppiamento e filtraggio che impediscono al rumore di commutazione di corrompere le misurazioni
- Layout dell'oscillatore a cristallo che garantisce una temporizzazione stabile per gli algoritmi di controllo
- Accesso all'interfaccia di debug che abilita lo sviluppo e la risoluzione dei problemi sul campo
- Supporto alla produzione che include la programmazione e lo sviluppo di test funzionali
Fornire una produzione economicamente vantaggiosa
La produzione di driver per motori deve bilanciare prestazioni, affidabilità e costi per soddisfare i requisiti del mercato competitivo in applicazioni consumer, industriali e automobilistiche. L'ottimizzazione della produzione attraverso l'automazione, l'efficienza dei test e la gestione della catena di approvvigionamento consente prezzi competitivi mantenendo gli standard di qualità.
APTPCB offre una produzione di driver per motori economicamente vantaggiosa.
Eccellenza nella produzione
Capacità di produzione
- Assemblaggio e test automatizzati che massimizzano la produttività e la coerenza
- Test di carico del motore che convalidano le prestazioni del driver con motori reali
- Test di corrente e termici che confermano le specifiche in condizioni nominali
- Validazione dell'interfaccia di comunicazione che verifica le interfacce encoder, Hall e di rete
- Controllo statistico di processo che monitora le tendenze di qualità consentendo il miglioramento
- Produzione di massa a supporto di programmi di consumo e automobilistici ad alto volume
Attraverso una produzione ottimizzata, test completi e una gestione della qualità coordinata con gli standard delle apparecchiature di comunicazione, APTPCB consente ai produttori di driver per motori di implementare soluzioni di controllo del movimento affidabili a livello globale.