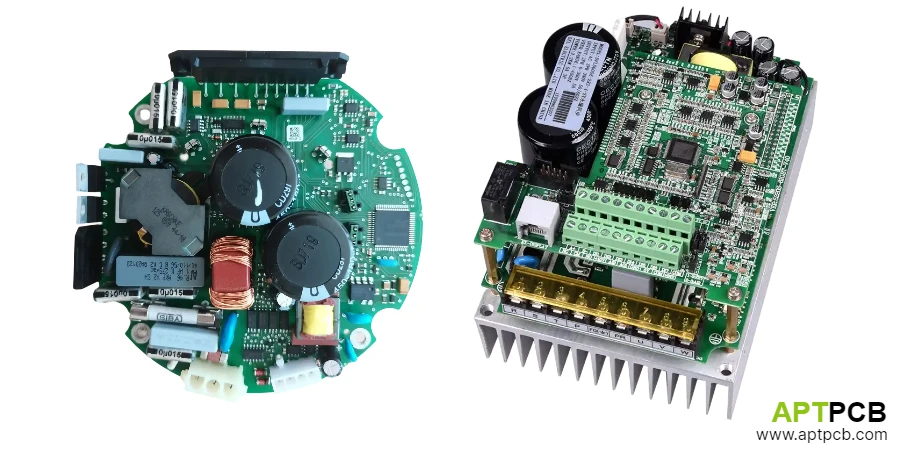
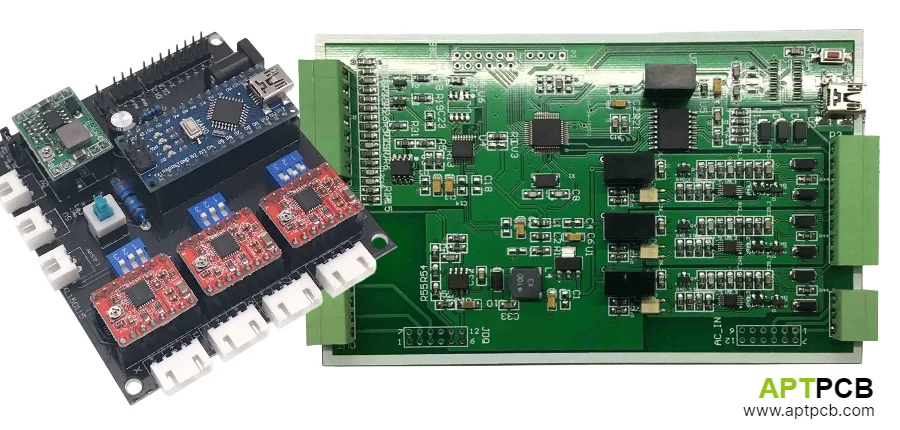
I controller motore spaziano da moduli integrati compatti ad azionamenti industriali completi, ciascuno richiedente progetti PCB ottimizzati per il tipo di motore target, gamma di potenza e requisiti applicativi. Le sfide fondamentali: efficienza di commutazione di potenza, precisione di controllo, gestione termica e conformità EMC, si applicano a questa gamma con enfasi variabile.
Questa guida affronta i principi di progettazione PCB che si applicano ai controller motore in applicazioni BLDC, passo-passo e induzione CA in contesti industriali.
In questa guida
- Selezione topologia stadio di potenza
- Integrazione driver gate
- Rilevamento posizione e corrente
- Implementazione controllo digitale
- Strategie di gestione termica
- Approcci conformità EMC
Selezione topologia stadio di potenza
La topologia dello stadio di potenza del controller motore dipende dal tipo di motore, gamma di tensione e requisiti prestazionali. Gli inverter trifase servono motori BLDC e induzione CA; ponti H o driver specializzati gestiscono motori passo-passo; configurazioni monofase funzionano per il controllo semplice di motori CC. Ogni topologia presenta requisiti di layout PCB distinti.
Gli inverter trifase utilizzano sei dispositivi di commutazione in una configurazione a ponte a tre gambe. Lo stadio di potenza può impiegare MOSFET o IGBT discreti, moduli di potenza integrati (IPM) o moduli di potenza intelligenti con driver gate integrati. Gli approcci basati su moduli semplificano il layout a livelli di potenza più elevati, mentre le soluzioni discrete offrono flessibilità e ottimizzazione dei costi per progetti a bassa potenza.
Per progetti PCB multistrato, il layout dello stadio di potenza deve minimizzare l'induttanza del loop bus CC: l'induttanza parassita nel percorso dal condensatore bus attraverso la coppia di dispositivi di commutazione e ritorno. Ogni nanohenry di induttanza del loop crea sovratensione durante la commutazione che sollecita i dispositivi e aumenta EMI.
Considerazioni progettazione topologia
- Inverter trifase: Standard per controllo motori BLDC e CA; sei interruttori con azionamento gate complementare.
- Ponte H: Quattro interruttori per fase; utilizzato per motori passo-passo o motori a spazzole CC.
- Moduli integrati: Gli IPM combinano più interruttori con driver gate; semplificano il layout ma limitano l'ottimizzazione termica.
- Barra bus vs. PCB: I progetti ad alta potenza possono utilizzare barre bus laminate anziché rame PCB per la distribuzione di potenza.
- Requisiti snubber: Dimensionamento snubber dipendente dalla topologia basato su caratteristiche dispositivo e induttanza layout.
- Freno/Rigenerazione: Disposizione topologia per frenata rigenerativa o chopper freno per decelerazione controllata.
Integrazione driver gate
I driver gate traducono segnali di controllo a bassa tensione nella corrente di azionamento necessaria per commutare semiconduttori di potenza. Il livello di integrazione varia da stadi driver discreti a circuiti integrati driver gate intelligenti completamente integrati con funzioni di protezione e diagnostica.
I driver gate high-side richiedono alimentazioni isolate o circuiti bootstrap che derivano la potenza di azionamento gate dall'uscita commutata. I progetti bootstrap offrono costi inferiori ma impongono limiti al ciclo di lavoro: il condensatore bootstrap si ricarica solo quando il dispositivo low-side conduce. Le applicazioni di controllo motore con potenziale ciclo di lavoro high-side al 100% (rigenerazione o iniezione CC) possono richiedere alimentazioni isolate.
Il layout PCB per driver gate deve minimizzare l'area del loop di azionamento gate mantenendo la spaziatura di isolamento. Il percorso della corrente di azionamento gate include l'uscita del driver, il resistore di gate, i terminali gate-source e il percorso di ritorno. L'induttanza in questo percorso causa ringing e influenza le caratteristiche di commutazione.
Progettazione driver gate
- Bootstrap vs. Isolato: Bootstrap per controllo motore standard; alimentazioni isolate per applicazioni che richiedono conduzione high-side senza commutazione low-side periodica.
- Selezione resistore gate: Bilancia velocità commutazione contro ringing ed EMI; resistori accensione e spegnimento separati ottimizzano indipendentemente.
- Morsetto Miller: Morsetto Miller attivo o bias gate negativo previene accensione spuria da accoppiamento dV/dt.
- Protezione DESAT: Rilevamento desaturazione per IGBT fornisce protezione rapida da cortocircuito.
- Corrispondenza propagazione: Corrispondenza ritardo propagazione high-side e low-side previene shoot-through.
- Generazione tempo morto: Inserimento tempo morto hardware come backup alla programmazione tempo morto software.
Rilevamento posizione e corrente
Gli algoritmi di controllo motore richiedono feedback accurato di posizione e corrente. Il rilevamento di posizione utilizza sensori Hall per controllo BLDC a sei fasi, encoder ottici o magnetici per controllo orientato al campo, o tecniche sensorless che stimano la posizione da back-EMF o firme di corrente. Il rilevamento di corrente abilita controllo coppia e protezione sovracorrente.
Le interfacce sensore Hall ricevono segnali digitali a bassa tensione da sensori montati nel motore. Il PCB deve condizionare questi segnali contro la captazione di rumore da cavi motore e commutazione potenza. Trasmissione differenziale o condizionamento segnale al motore riduce suscettibilità rumore per lunghi percorsi cavi.
I requisiti di precisione rilevamento corrente variano con approccio controllo. Controllo BLDC a sei fasi tollera precisione rilevamento corrente ±5%, mentre controllo orientato al campo ad alte prestazioni beneficia di precisione ±1%. Rilevamento basato su shunt con amplificatori isolati raggiunge questa precisione a costi inferiori rispetto a sensori corrente effetto Hall, con processi test e qualità che assicurano precisione calibrazione rilevamento.
Implementazione rilevamento
- Interfaccia sensore Hall: Ingressi trigger Schmitt con filtraggio per immunità rumore; resistori pull-up dimensionati per lunghezza cavo.
- Interfaccia encoder: Ricevitori linea differenziale per encoder incrementali; interfaccia seriale per encoder assoluti.
- Posizionamento shunt corrente: Shunt link CC misura corrente totale; shunt gamba abilitano ricostruzione corrente fase.
- Amplificatori isolati: Classificazione isolamento rinforzato per amplificatori che misurano correnti high-side.
- Timing campionamento: Campionamento ADC sincronizzato con PWM per misurare durante periodi corrente stabili.
- Tecniche sensorless: Rilevamento zero-crossing BEMF o iniezione alta frequenza per stima posizione.
Implementazione controllo digitale
Il controllo motore digitale viene eseguito su microcontrollori o DSP con periferiche specializzate per generazione PWM, sincronizzazione ADC ed elaborazione encoder. Il PCB deve supportare queste funzioni minimizzando l'accoppiamento di rumore dagli stadi di potenza ai circuiti digitali.
La generazione PWM richiede timer hardware con funzionalità per uscite complementari, inserimento tempo morto e trigger ADC sincronizzato. PWM allineato al centro riduce ondulazione corrente e abilita campionamento metà portante per misura corrente accurata. La risoluzione PWM e selezione frequenza portante influenza larghezza banda controllo raggiungibile e rumore udibile.
L'esecuzione algoritmo controllo avviene all'interno del periodo ciclo PWM: tipicamente 50-100 μs per PWM 10-20 kHz. La sequenza completa di campionamento ADC, calcolo controllo e aggiornamento PWM deve completarsi entro questa finestra con timing deterministico. Progetti PCB controllo industriale devono supportare requisiti prestazioni in tempo reale.
Architettura controllo digitale
- Selezione processore: DSP controllo motore o MCU con PWM integrato, ADC e periferiche encoder.
- Periferica PWM: Hardware supporta uscite complementari, tempo morto programmabile, ingressi guasto e trigger ADC.
- Prestazioni ADC: Risoluzione minima 12 bit; tempo conversione 1-2 μs per applicazioni loop corrente.
- Hardware encoder: Decodificatore quadratura conta senza intervento software; funzione cattura marca tempo impulsi indice.
- Interfaccia comunicazione: CAN, Ethernet o fieldbus per ingresso comandi e diagnostica.
- Watchdog e guasto: Watchdog hardware e ingressi guasto che disabilitano PWM indipendentemente dal software.
Strategie di gestione termica
I controller motore dissipano potenza in perdite di commutazione e conduzione che variano con carico e frequenza commutazione. La progettazione termica deve gestire sia il funzionamento continuo a carico nominale che condizioni sovraccarico transitorio durante avviamento o accelerazione motore.
Il montaggio semiconduttore potenza determina resistenza termica da giunzione ad ambiente. Dispositivi montati su PCB si affidano a diffusione rame e vie termiche per condurre calore; progetti a potenza più elevata montano dispositivi su dissipatori calore o piastre fredde con materiale interfaccia termica. La progettazione PCB termica deve fornire percorsi termici adeguati entro vincoli layout.
I controller motore operano spesso in spazi chiusi: alloggiamenti motore, armadi apparecchiature o compartimenti veicoli, dove la temperatura ambiente può raggiungere 85°C o più. Selezione componenti e progettazione termica devono tenere conto di questi ambienti elevati mantenendo funzionamento affidabile.
Elementi progettazione termica
- Percorso resistenza termica: Progettare resistenza termica giunzione-ambiente coerente con dissipazione potenza e limiti temperatura.
- Peso rame: 2-4 oz rame in aree potenza per trasporto corrente e diffusione termica.
- Array vie termiche: Array vie sotto pacchetti potenza riducono resistenza termica a strati interni.
- Integrazione dissipatore calore: Progetti alta potenza montano semiconduttori su dissipatori calore esterni tramite materiale interfaccia termica.
- Rilevamento temperatura: Termistori NTC vicino a dispositivi potenza abilitano protezione termica.
- Definizione declassamento: Specifica chiara capacità corrente contro temperatura ambiente.
Approcci conformità EMC
I controller motore generano EMI da commutazione alta frequenza e irradiano attraverso cavi motore che agiscono come antenne. Soddisfare requisiti EMC implica filtraggio, schermatura e tecniche layout coordinate attraverso stadio potenza, circuiti controllo e interconnessioni sistema.
Il filtraggio emissioni condotte all'ingresso CC utilizza induttanze modo comune e condensatori differenziali per attenuare emissioni da commutazione PWM. La progettazione filtro deve raggiungere attenuazione richiesta gestendo corrente motore senza saturazione. I processi test EMC verificano efficacia filtro attraverso gamma operativa.
Le emissioni cavo motore dipendono da tassi fronte commutazione, lunghezza cavo e schermatura. Filtri uscita (filtri dV/dt o onda sinusoidale) rallentano transizioni tensione uscita per ridurre contenuto alta frequenza. Questi filtri proteggono anche isolamento motore da picchi tensione che si verificano con lunghezze cavo lunghe.
Approcci progettazione EMC
- Filtraggio ingresso: Filtraggio multistadio modo comune e modo differenziale a ingresso CC o CA.
- Controllo dV/dt uscita: Filtri dV/dt limitano tasso salita tensione uscita; riducono correnti cuscinetto motore ed EMI.
- Schermatura cavi: Cavi motore schermati con terminazione appropriata riducono emissioni radiate.
- Selezione frequenza PWM: Evitare frequenze PWM che creano emissioni a frequenze ricevitore sensibili.
- Spettro diffuso: PWM spettro diffuso riduce emissioni picco a frequenza PWM e armoniche.
- Integrità piano terra: Piani terra continui minimizzano aree loop e controllano percorsi ritorno.
Riepilogo
La progettazione PCB controller motore bilancia efficienza gestione potenza, precisione controllo, gestione termica e conformità EMC attraverso applicazioni da azionamenti embedded compatti a controller industriali completi. I principi fondamentali si applicano indipendentemente dalla scala: minimizzare induttanza loop commutazione, mantenere integrità segnale per rilevamento e controllo, e gestire percorsi termici per funzionamento affidabile. I dettagli implementazione variano con livello potenza, tipo motore e requisiti applicativi, ma i progetti di successo condividono attenzione a queste preoccupazioni ingegneristiche fondamentali.