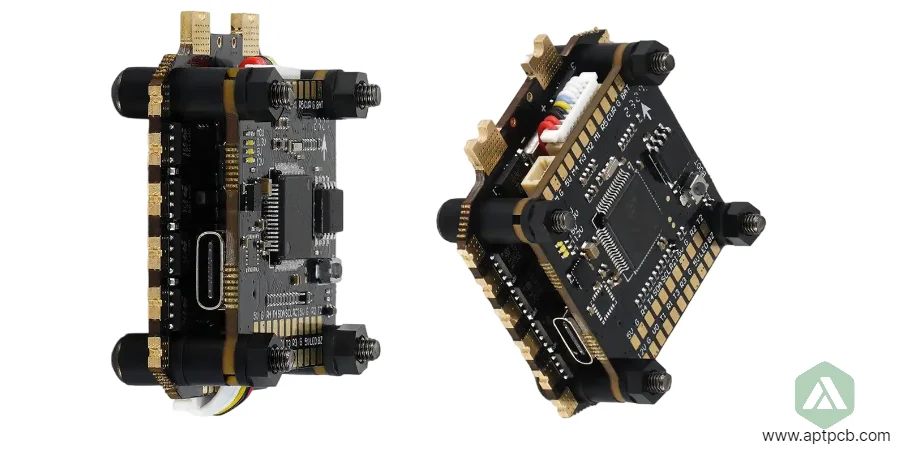
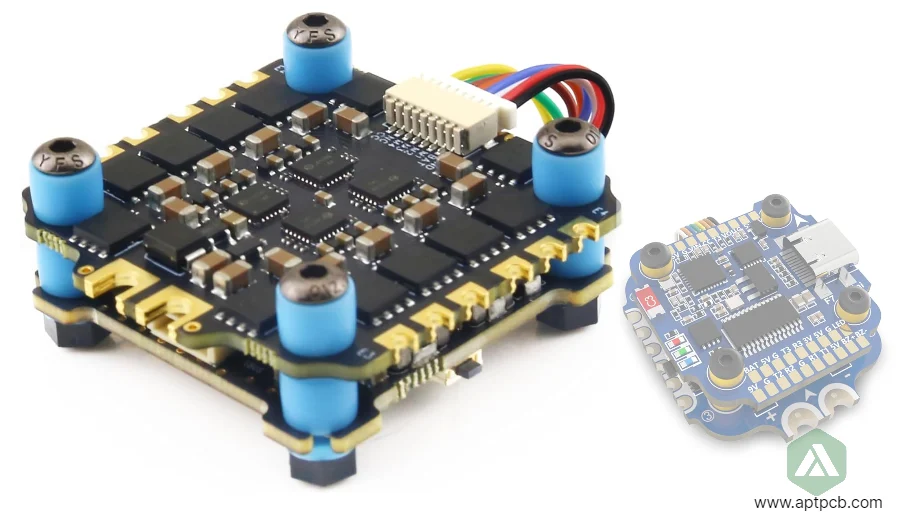
Los ensamblajes de controladores de vuelo integran unidades de medición inercial (IMU) de alto rendimiento, sensores barométricos, magnetómetros, receptores GPS y microcontroladores que ejecutan algoritmos de fusión de sensores a tasas de actualización de 1-8 kHz, proporcionando una estimación precisa de la actitud, navegación autónoma y estabilización de vuelo en cuadricópteros de consumo, drones de inspección comerciales y UAV de entrega autónomos que requieren una operación confiable, manteniendo una precisión de actitud de ±1°, una precisión de posicionamiento GPS de <5 cm y una operación a prueba de fallos que protege contra fallos de sensores, pérdida de comunicación o errores de software a lo largo de miles de horas de vuelo.
En APTPCB, ofrecemos servicios especializados de ensamblaje de controladores de vuelo que implementan una integración de sensores de alta fiabilidad, una ejecución de algoritmos validada y procedimientos de calibración exhaustivos con capacidades de ensamblaje llave en mano. Nuestra experiencia es compatible con controladores de carreras que requieren tasas de bucle de 8 kHz hasta pilotos automáticos comerciales que demandan navegación por puntos de referencia y funcionalidad de retorno a casa, con una fabricación validada que garantiza un rendimiento consistente del sensor y la ejecución del algoritmo.
Logrando la integración y calibración de sensores de precisión
El rendimiento del controlador de vuelo depende fundamentalmente de la precisión del sensor, ya que los errores de sesgo del giroscopio causan la deriva de la actitud, la desalineación del acelerómetro crea errores de posición y la interferencia del magnetómetro provoca la desviación del rumbo, lo que puede causar fallos de navegación o un vuelo inestable. Lograr una estabilidad de sesgo del giroscopio de <0,5°/s, una precisión del acelerómetro de <50 mg y una precisión de rumbo de <5° en rangos de temperatura de -40 a +85°C, manteniendo una sincronización de tiempo a nivel de microsegundos, presenta desafíos técnicos significativos. Un rendimiento inadecuado del sensor provoca una deriva de actitud que requiere una corrección manual continua, errores de posición que afectan la navegación autónoma o una inestabilidad completa del vuelo que causa accidentes, lo que impacta directamente la seguridad operativa, el éxito de la misión y la satisfacción del cliente, especialmente para aplicaciones comerciales que requieren operación autónoma.
En APTPCB, nuestros servicios de ensamblaje implementan una integración de sensores validada, logrando especificaciones de precisión mediante una calibración exhaustiva.
Técnicas clave de integración de sensores
- Selección de IMU de alto rendimiento: Sensores MEMS de grado industrial (Invensense ICM-42688, Bosch BMI088) que logran una estabilidad de sesgo de <0,5°/s y tasas de muestreo de 1000Hz+ que soportan bucles de estabilización de alto ancho de banda con validación de la calidad de las pruebas.
- Montaje de sensores de precisión: Colocación automatizada (pick-and-place) con una precisión de ±25μm que asegura la alineación de la IMU manteniendo una tolerancia de montaje <1°, crítica para la precisión de la fusión de sensores.
- Redundancia multisensor: Configuraciones IMU duales o triples que permiten la detección de fallos del sensor y la operación continua a pesar de fallos de un solo sensor, lo que soporta aplicaciones críticas para la seguridad.
- Compensación de temperatura: Calibración de fábrica que mide las características del sensor en rangos de temperatura, almacenando los parámetros de compensación en memoria no volátil, manteniendo la precisión a pesar de las variaciones ambientales.
- Protocolos de calibración de seis puntos: Calibración automatizada que mide las salidas del sensor en múltiples orientaciones, calculando los factores de desplazamiento y escala, logrando la precisión especificada en todo el rango de medición.
- Pruebas de validación: Pruebas post-ensamblaje en mesas de velocidad de precisión y plataformas de vibración que validan la precisión del sensor y el rendimiento del algoritmo en todas las condiciones de operación a través de procedimientos de pruebas funcionales.
Rendimiento del sensor calibrado
Al implementar procesos de fabricación de precisión, procedimientos de calibración validados y pruebas exhaustivas de sensores respaldadas por equipos de calibración automatizados, APTPCB entrega controladores de vuelo que cumplen con las especificaciones de precisión del sensor, lo que permite un control de vuelo estable, una navegación precisa y una operación autónoma fiable en aplicaciones de UAV (drones) de consumo, comerciales y militares.
Ejecución de algoritmos de fusión de sensores y control de alta velocidad
Los controladores de vuelo modernos ejecutan algoritmos sofisticados de fusión de sensores (filtros de Kalman extendidos, filtros complementarios) que combinan datos de giroscopio, acelerómetro, magnetómetro y GPS a tasas de actualización de 1-8 kHz, proporcionando una estimación óptima del estado, rechazando el ruido del sensor mientras rastrean dinámicas rápidas. La ejecución de algoritmos requiere microcontroladores de alto rendimiento (ARM Cortex-M7 a 400-600 MHz) con unidades de punto flotante que ejecutan operaciones matemáticas complejas dentro de estrictas restricciones de tiempo. Un rendimiento computacional inadecuado causa retrasos en el bucle de control que degradan los márgenes de estabilidad, un ancho de banda de filtro insuficiente que permite que el ruido afecte la precisión del control, o una fluctuación de tiempo que crea oscilaciones, lo que impacta directamente la calidad del vuelo, la capacidad de respuesta del control y la seguridad operativa, especialmente para perfiles de vuelo agresivos en aplicaciones de carreras o inspección industrial.
En APTPCB, nuestra fabricación soporta diseños avanzados de controladores de vuelo que ejecutan algoritmos exigentes de manera confiable.
Técnicas de implementación de la ejecución de algoritmos
- Integración de MCU de alto rendimiento: Microcontroladores ARM Cortex-M7 (STM32H7, NXP i.MX RT) a 480-600 MHz con FPU de doble precisión que ejecutan algoritmos de fusión de sensores y control con margen computacional que soporta la expansión de características a través de la fabricación con sistema de calidad.
- Sistema Operativo en Tiempo Real: RTOS determinista (FreeRTOS, ChibiOS) que asegura una programación de tareas predecible y mantiene una temporización de bucle consistente a pesar de las cargas computacionales variables.
- Optimización de DMA y periféricos: Acceso directo a memoria para la transferencia de datos de sensores y comunicaciones SPI/I2C basadas en DMA, minimizando la sobrecarga de la CPU y maximizando la potencia de procesamiento disponible para los algoritmos de control.
- Optimización de punto flotante: Implementación de algoritmos que utilizan FPU de hardware, manteniendo la precisión mientras se cumplen los requisitos de rendimiento en tiempo real.
- Validación de la temporización: Perfilado del tiempo de ejecución que asegura que la ejecución del algoritmo en el peor de los casos se completa dentro del período del bucle con un margen adecuado, previniendo violaciones de temporización que causan inestabilidad.
- Pruebas de validación de algoritmos: Pruebas de vuelo en diversas condiciones que validan el rendimiento del control, los márgenes de estabilidad y el manejo de modos de falla, cumpliendo las especificaciones en toda la envolvente operativa.
Rendimiento de algoritmo validado
Mediante la selección de hardware de alto rendimiento, la implementación de software optimizada y pruebas de validación exhaustivas coordinadas con los procesos de fabricación, APTPCB permite a los controladores de vuelo ejecutar algoritmos de control avanzados, logrando las tasas de bucle especificadas, los márgenes de estabilidad y la precisión de control, soportando drones de carreras de consumo de alto rendimiento hasta plataformas autónomas comerciales críticas para la seguridad.
Integración de GPS y capacidades de navegación autónoma
Las operaciones de vuelo autónomo requieren la integración de GPS que proporcione información de posición, velocidad y tiempo, lo que permite la navegación por puntos de referencia, la funcionalidad de retorno a casa y los modos de mantenimiento de posición. Lograr una precisión de posicionamiento CEP (error circular probable) inferior a 5 m, una estimación de velocidad inferior a 0,5 m/s y un seguimiento satelital fiable a pesar de la multitrayectoria, las interferencias o la visibilidad limitada del cielo presenta desafíos significativos. Un rendimiento GPS inadecuado causa errores de navegación que afectan las misiones autónomas, la deriva de posición que provoca incidentes de "fly-away" o situaciones de pérdida de GPS que requieren recuperación manual, lo que afecta significativamente la seguridad operativa, la fiabilidad de la misión y la viabilidad comercial, especialmente para aplicaciones de entrega, topografía o inspección que requieren una navegación autónoma precisa.
En APTPCB, nuestro ensamblaje implementa una integración GPS validada que soporta operaciones autónomas fiables.
Técnicas de integración GPS
- Receptores GPS de alta sensibilidad: Módulos GPS modernos (u-blox M10, Quectel L96) que soportan GNSS multi-constelación (GPS, GLONASS, Galileo, BeiDou) mejorando la disponibilidad satelital y la precisión de posicionamiento a través del prototipado de ensamblaje NPI.
- Implementación de GPS RTK: GPS cinemático en tiempo real que logra una precisión de posicionamiento a nivel centimétrico, soportando aplicaciones de agricultura de precisión, topografía e inspección que requieren alta precisión.
- Fusión de sensores GPS/IMU: Integración estrechamente acoplada que combina la posición/velocidad GPS con las mediciones IMU, proporcionando navegación continua a pesar de las interrupciones temporales del GPS o la degradación de la señal.
- Optimización de la ubicación de la antena: Ubicación estratégica de la antena GPS que maximiza la visibilidad del cielo mientras minimiza la interferencia de motores, ESC o transmisores de RF, manteniendo la calidad de la señal.
- Detección de interferencias GPS: Monitoreo de la intensidad de la señal y el recuento de satélites que detecta interferencias o bloqueos, lo que permite recurrir a la navegación basada en IMU o a un aterrizaje controlado.
- Calibración de la brújula: Calibración automatizada del magnetómetro que compensa las distorsiones de hierro duro y blando de la estructura y la electrónica del dron, logrando una estimación precisa del rumbo y apoyando la navegación sin GPS.
Rendimiento de navegación fiable
Al implementar una integración GPS validada, algoritmos de fusión de sensores y procedimientos de calibración exhaustivos respaldados por la experiencia de fabricación, APTPCB permite a los controladores de vuelo alcanzar especificaciones de precisión y fiabilidad de navegación que soportan operaciones comerciales autónomas, navegación por puntos de referencia y funcionalidad de retorno a casa en diversas aplicaciones y perfiles de misión de UAV.
Provisión de características completas de seguridad y a prueba de fallos
Los controladores de vuelo que gestionan operaciones autónomas deben detectar y responder a fallos, incluyendo mal funcionamiento de sensores, pérdida de comunicación, agotamiento de la batería o fallos de motor, implementando procedimientos a prueba de fallos que protejan las aeronaves y al personal de tierra. Una implementación de seguridad inadecuada provoca descensos incontrolados por pérdida de señal, incidentes de "fly-away" por fallos de navegación o accidentes por fallos de motor no detectados, lo que crea riesgos de seguridad, problemas de cumplimiento normativo y una exposición significativa a la responsabilidad, especialmente para operaciones comerciales que requieren el cumplimiento de la FAA Parte 107 o EASA.
En APTPCB, nuestra fabricación respalda diseños de controladores de vuelo críticos para la seguridad que implementan características de protección integrales.
Técnicas de implementación de seguridad
- Arquitectura de sensores redundante: Configuraciones duales de IMU, barómetro o magnetómetro que permiten la verificación cruzada de sensores, la detección de fallos y el mantenimiento de la operación a pesar de los malfuncionamientos de un solo sensor mediante el control de calidad de la producción en masa.
- Procedimientos por pérdida de señal: Acciones a prueba de fallos configurables (regreso a casa, aterrizaje inmediato, vuelo estacionario) activadas durante la pérdida de comunicación, asegurando una recuperación controlada a pesar del fallo del enlace de radio.
- Monitorización de la batería: Monitorización de voltaje y corriente que detecta condiciones de batería baja, activando advertencias y un aterrizaje forzado, evitando la sobredescarga de la batería que podría causar un accidente.
- Geofencing Implementation: Límites virtuales que impiden el vuelo más allá de las áreas autorizadas, apoyando el cumplimiento normativo y previniendo incidentes de pérdida de control.
- Pre-Flight Safety Checks: Verificaciones de seguridad previas al vuelo automatizadas que validan la funcionalidad del sensor, el bloqueo GPS, el voltaje de la batería y la corrección de la configuración antes de permitir el despegue, previniendo operaciones con sistemas degradados.
- Flight Logging and Analysis: Registro de datos completo que captura datos de sensores, salidas de control y eventos del sistema, apoyando la investigación de incidentes y la mejora continua de la seguridad.
Operación crítica para la seguridad
Mediante la implementación integral de características de seguridad, algoritmos validados de detección de fallas y procedimientos de prueba exhaustivos respaldados por sistemas de gestión de calidad, APTPCB permite que los controladores de vuelo cumplan con los requisitos de seguridad, apoyando operaciones comerciales de UAV, uso recreativo y aplicaciones especializadas que requieren un vuelo autónomo confiable con protección integral a prueba de fallos.
Habilitación de la comunicación y la integración de telemetría
Los controladores de vuelo se interconectan con receptores RC, radios de telemetría, computadoras compañeras y estaciones de control en tierra, intercambiando comandos de control, datos de telemetría y parámetros de misión, lo que requiere comunicaciones confiables de baja latencia que soporten el control manual, misiones autónomas y monitoreo en tiempo real. Una implementación de comunicación inadecuada causa latencia de control que afecta la calidad del vuelo, interrupciones de telemetría que impiden el monitoreo o incompatibilidad que limita la integración del sistema, lo que impacta significativamente la usabilidad operativa, la flexibilidad de la misión y la satisfacción del cliente, especialmente para aplicaciones comerciales que requieren integración con sistemas empresariales.
En APTPCB, nuestro ensamblaje soporta interfaces de comunicación completas que permiten la integración del sistema.
Técnicas de integración de la comunicación
- Soporte de múltiples protocolos: Interfaces de receptor PWM, PPM, SBUS, CRSF que soportan diversos sistemas RC, además de UART/I2C/CAN para periféricos, lo que permite una configuración de sistema flexible.
- Implementación del protocolo MAVLink: Protocolo de telemetría estándar de la industria que permite la integración con estaciones de control en tierra (Mission Planner, QGroundControl) soportando la planificación de misiones y el monitoreo en tiempo real.
- Interfaz de computadora compañera: Conexiones seriales o Ethernet de alta velocidad que permiten la integración con computadoras a bordo (Raspberry Pi, Nvidia Jetson) soportando visión por computadora, procesamiento de IA o aplicaciones personalizadas.
- Blackbox Logging: Registro de datos de alta velocidad que captura datos completos de sensores y control, lo que permite el análisis posterior al vuelo y la optimización del rendimiento.
- OSD Integration: Interfaces de visualización en pantalla (OSD) que superponen la telemetría en el video FPV, lo que permite la monitorización en tiempo real durante las operaciones de vuelo manual.
- Wireless Configuration: Interfaces WiFi o Bluetooth que permiten el ajuste inalámbrico de parámetros y las actualizaciones de firmware, simplificando las operaciones de campo a través del aprovisionamiento de componentes de módulos RF certificados.
Conectividad Integral
A través de interfaces de comunicación validadas, soporte de protocolo y pruebas de integración de sistemas coordinadas con los procesos de fabricación, APTPCB permite que los controladores de vuelo logren una comunicación confiable que respalda el control manual, las operaciones autónomas y la integración de sistemas en aplicaciones de carreras FPV de consumo, inspección comercial y UAV de entrega autónoma.
Apoyo al desarrollo rápido y la escalabilidad de la producción
El desarrollo de controladores de vuelo requiere un prototipado rápido que apoye el desarrollo de algoritmos y las pruebas de vuelo, una transición rápida a la producción piloto que valide los procesos de fabricación, y una producción escalable de alto volumen que satisfaga la demanda en los mercados de consumo y comerciales. Los enfoques de fabricación inflexibles causan ciclos de desarrollo extendidos que retrasan la introducción en el mercado, problemas de calidad durante el aumento de la producción que afectan la fiabilidad, o una capacidad insuficiente que limita el crecimiento empresarial — impactando significativamente la posición competitiva y las oportunidades de ingresos en los mercados de UAV de rápido movimiento.
En APTPCB, proporcionamos un soporte integral que abarca desde el prototipo hasta la producción en volumen.
Soporte de desarrollo y producción
Servicios de prototipado rápido
- Ensamblaje rápido que entrega prototipos funcionales en 5-7 días, apoyando el desarrollo iterativo de algoritmos y los ciclos de pruebas de vuelo.
- Retroalimentación de diseño para fabricación que identifica problemas potenciales, permitiendo la optimización antes del compromiso de producción.
- Cambios de diseño flexibles que se adaptan a las actualizaciones de algoritmos, mejoras de sensores o adiciones de características durante toda la fase de desarrollo.
- Pruebas y calibración exhaustivas que apoyan las pruebas de vuelo y las actividades de validación.
Capacidades de producción en volumen
- Procesos automatizados de ensamblaje y calibración que logran una calidad consistente en miles de unidades, apoyando programas de consumo y comerciales.
- Control estadístico de procesos que monitorea los parámetros de calibración y los resultados de las pruebas, asegurando la consistencia de la producción e identificando la deriva del proceso.
- Escalado de capacidad flexible que se adapta al crecimiento de la demanda de cientos a cientos de miles anualmente a través de servicios de recubrimiento conformado de PCB y protección.
- Gestión de la cadena de suministro que mantiene la disponibilidad de componentes, apoyando la producción ininterrumpida a pesar de la escasez en toda la industria.
- Documentación y trazabilidad completas que respaldan el análisis de garantías, la investigación de fallas y la mejora continua.
Soporte completo del ciclo de vida
A través de un soporte de desarrollo integral, procesos de fabricación validados y capacidades de producción escalables coordinadas con equipos experimentados de gestión de programas, APTPCB permite a los fabricantes de controladores de vuelo lanzar, escalar y mantener con éxito productos para drones de carreras de consumo, plataformas de inspección comerciales y UAV de entrega autónomos, apoyando el crecimiento empresarial y el éxito en el mercado mundial. Los conjuntos de controladores de vuelo representan la culminación de la integración avanzada de sensores, la ejecución de algoritmos en tiempo real y el diseño de sistemas críticos para la seguridad, que requieren experiencia de fabricación especializada, pruebas de validación exhaustivas y una gestión de calidad continua. Mediante la integración de sensores de precisión, procedimientos de calibración validados y protocolos de prueba exhaustivos, respaldados por capacidades de fabricación especial de PCB, APTPCB permite a los fabricantes de UAV implementar controladores de vuelo fiables que cumplen con las especificaciones de rendimiento, los requisitos de seguridad y la fiabilidad operativa, apoyando productos de consumo exitosos, operaciones comerciales y aplicaciones especializadas en los mercados globales de drones.