Los controladores de motor abarcan un espectro desde módulos integrados compactos hasta accionamientos industriales con todas las funciones, cada uno de los cuales requiere diseños de PCB optimizados para su tipo de motor objetivo, rango de potencia y requisitos de aplicación. Los desafíos fundamentales (eficiencia de conmutación de potencia, precisión de control, gestión térmica y cumplimiento de EMC) se aplican en este rango con énfasis variable.
Esta guía aborda los principios de diseño de PCB que se aplican a los controladores de motores en aplicaciones BLDC, paso a paso y de inducción de CA en entornos industriales.
En esta guía
- Selección de topología de etapa de potencia
- Integración de controlador de puerta
- Detección de posición y corriente
- Implementación de control digital
- Estrategias de gestión térmica
- Enfoques de cumplimiento de EMC
Selección de topología de etapa de potencia
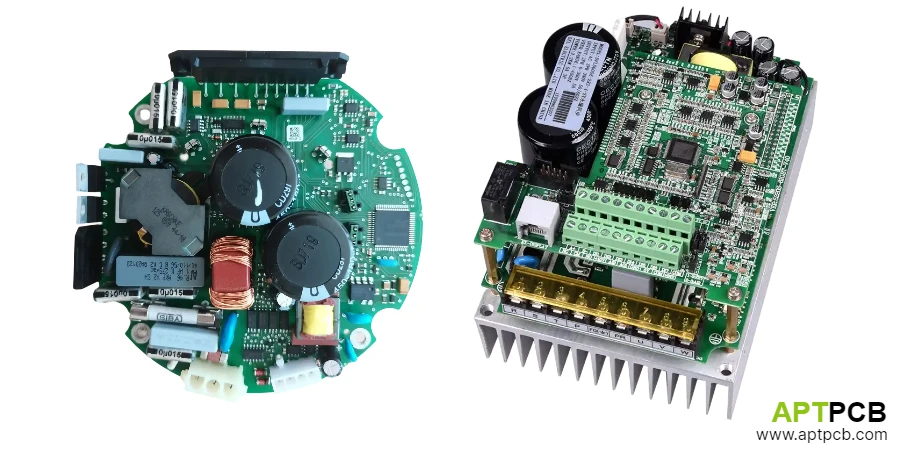
La topología de la etapa de potencia del controlador de motor depende del tipo de motor, el rango de voltaje y los requisitos de rendimiento. Los inversores trifásicos sirven para motores BLDC y de inducción de CA; los puentes H o controladores especializados manejan motores paso a paso; las configuraciones monofásicas funcionan para el control simple de motores de CC. Cada topología presenta distintos requisitos de diseño de PCB.
Los inversores trifásicos utilizan seis dispositivos de conmutación en una configuración de puente de tres patas. La etapa de potencia puede emplear MOSFET o IGBT discretos, módulos de potencia integrados (IPM) o módulos de potencia inteligentes con controladores de puerta integrados. Los enfoques basados en módulos simplifican el diseño a niveles de potencia más altos, mientras que las soluciones discretas ofrecen flexibilidad y optimización de costos para diseños de menor potencia.
Para diseños de PCB multicapa, el diseño de la etapa de potencia debe minimizar la inductancia del bucle del bus de CC: la inductancia parásita en la ruta desde el condensador del bus a través del par de dispositivos de conmutación y viceversa. Cada nanohenrio de inductancia de bucle crea un sobreimpulso de voltaje durante la conmutación que estresa los dispositivos y aumenta la EMI.
Consideraciones de diseño de topología
- Inversor trifásico: Estándar para control de motores BLDC y CA; seis interruptores con accionamiento de puerta complementario.
- Puente H: Cuatro interruptores por fase; utilizado para motores paso a paso o motores de escobillas de CC.
- Módulos integrados: Los IPM combinan múltiples interruptores con controladores de puerta; simplifican el diseño pero limitan la optimización térmica.
- Barra de bus vs. PCB: Los diseños de alta potencia pueden usar barras de bus laminadas en lugar de cobre de PCB para la distribución de energía.
- Requisitos de amortiguador: Dimensionamiento del amortiguador dependiente de la topología basado en las características del dispositivo y la inductancia del diseño.
- Freno/Regen: Provisión de topología para frenado regenerativo o chopper de freno para desaceleración controlada.
Integración de controlador de puerta
Los controladores de puerta traducen señales de control de bajo voltaje en la corriente de accionamiento necesaria para conmutar semiconductores de potencia. El nivel de integración varía desde etapas de controlador discretas hasta circuitos integrados de controlador de puerta inteligente totalmente integrados con funciones de protección y diagnóstico.
Los controladores de puerta de lado alto requieren suministros aislados o circuitos de arranque que derivan la potencia de accionamiento de la puerta de la salida conmutada. Los diseños de arranque ofrecen un costo menor pero imponen límites al ciclo de trabajo: el condensador de arranque se recarga solo cuando el dispositivo de lado bajo conduce. Las aplicaciones de control de motores con un potencial ciclo de trabajo de lado alto del 100% (regeneración o inyección de CC) pueden requerir suministros aislados.
El diseño de PCB para controladores de puerta debe minimizar el área del bucle de accionamiento de la puerta mientras mantiene el espaciado de aislamiento. La ruta de corriente de accionamiento de la puerta incluye la salida del controlador, la resistencia de la puerta, los terminales de fuente de puerta y la ruta de retorno. La inductancia en esta ruta provoca oscilaciones y afecta las características de conmutación.
Diseño de controlador de puerta
- Arranque vs. Aislado: Arranque para control de motor estándar; suministros aislados para aplicaciones que requieren conducción de lado alto sin conmutación periódica de lado bajo.
- Selección de resistencia de puerta: Equilibra la velocidad de conmutación contra oscilaciones y EMI; las resistencias de encendido y apagado separadas se optimizan de forma independiente.
- Abrazadera Miller: La abrazadera Miller activa o la polarización de puerta negativa evitan el encendido espurio por acoplamiento dV/dt.
- Protección DESAT: La detección de desaturación para IGBT proporciona una protección rápida contra cortocircuitos.
- Coincidencia de propagación: La coincidencia de retardo de propagación de lado alto y lado bajo evita el disparo cruzado.
- Generación de tiempo muerto: Inserción de tiempo muerto de hardware como respaldo para la programación de tiempo muerto de software.
Detección de posición y corriente
Los algoritmos de control de motor requieren una posición precisa y retroalimentación de corriente. La detección de posición utiliza sensores Hall para control BLDC de seis pasos, codificadores ópticos o magnéticos para control orientado al campo, o técnicas sin sensores que estiman la posición a partir de firmas de corriente o fuerza contraelectromotriz. La detección de corriente permite el control de par y la protección contra sobrecorriente.
Las interfaces de sensor Hall reciben señales digitales de bajo voltaje de sensores montados en el motor. La PCB debe acondicionar estas señales contra la captación de ruido de los cables del motor y la conmutación de potencia. La transmisión diferencial o el acondicionamiento de señal en el motor reducen la susceptibilidad al ruido para recorridos de cable largos.
Los requisitos de precisión de detección de corriente varían con el enfoque de control. El control BLDC de seis pasos tolera una precisión de detección de corriente del ±5%, mientras que el control orientado al campo de alto rendimiento se beneficia de una precisión del ±1%. La detección basada en derivación con amplificadores aislados logra esta precisión a un costo menor que los sensores de corriente de efecto Hall, con los procesos de prueba y calidad asegurando la precisión de calibración de detección.
Implementación de detección
- Interfaz de sensor Hall: Entradas de disparador Schmitt con filtrado para inmunidad al ruido; resistencias de pull-up dimensionadas para la longitud del cable.
- Interfaz de codificador: Receptores de línea diferencial para codificadores incrementales; interfaz serie para codificadores absolutos.
- Colocación de derivación de corriente: La derivación de enlace de CC mide la corriente total; las derivaciones de pierna permiten la reconstrucción de la corriente de fase.
- Amplificadores aislados: Clasificación de aislamiento reforzada para amplificadores que miden corrientes de lado alto.
- Temporización de muestreo: Muestreo ADC sincronizado con PWM para medir durante períodos de corriente estables.
- Técnicas sin sensores: Detección de cruce de cero BEMF o inyección de alta frecuencia para estimación de posición.
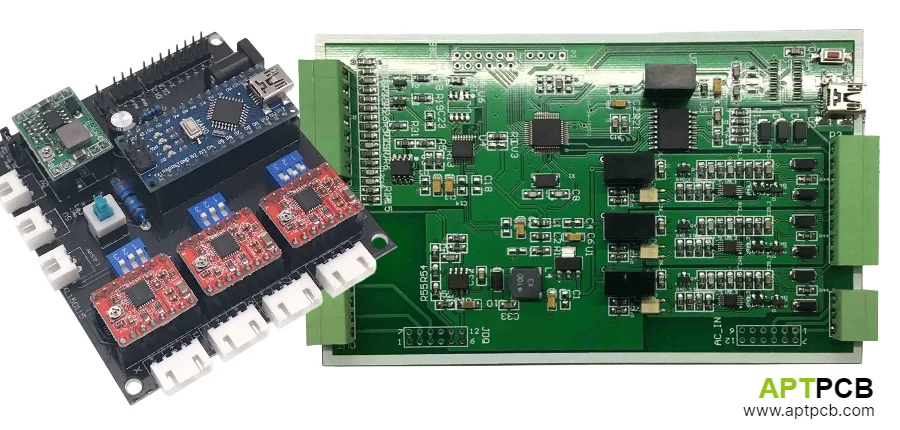
Implementación de control digital
El control digital del motor se ejecuta en microcontroladores o DSP con periféricos especializados para generación de PWM, sincronización de ADC y procesamiento de codificador. La PCB debe soportar estas funciones mientras minimiza el acoplamiento de ruido de las etapas de potencia a los circuitos digitales.
La generación de PWM requiere temporizadores de hardware con características para salidas complementarias, inserción de tiempo muerto y activación de ADC sincronizada. El PWM alineado al centro reduce la ondulación de corriente y permite el muestreo de portadora media para una medición de corriente precisa. La resolución PWM y la selección de frecuencia portadora afectan el ancho de banda de control alcanzable y el ruido audible.
La ejecución del algoritmo de control ocurre dentro del período del ciclo PWM, generalmente 50-100 μs para PWM de 10-20 kHz. La secuencia completa de muestreo ADC, cálculo de control y actualización PWM debe completarse dentro de esta ventana con una temporización determinista. Los diseños de PCB de control industrial deben admitir requisitos de rendimiento en tiempo real.
Arquitectura de control digital
- Selección de procesador: DSP de control de motor o MCU con periféricos PWM, ADC y codificador integrados.
- Periférico PWM: El hardware admite salidas complementarias, tiempo muerto programable, entradas de falla y activadores ADC.
- Rendimiento de ADC: Resolución mínima de 12 bits; tiempo de conversión de 1-2 μs para aplicaciones de bucle de corriente.
- Hardware de codificador: El decodificador de cuadratura cuenta sin intervención de software; la función de captura marca el tiempo de los pulsos índice.
- Interfaz de comunicación: CAN, Ethernet o bus de campo para entrada de comandos y diagnósticos.
- Vigilancia y falla: Vigilancia de hardware y entradas de falla que deshabilitan PWM independientemente del software.
Estrategias de gestión térmica
Los controladores de motor disipan potencia en pérdidas de conmutación y conducción que varían con la carga y la frecuencia de conmutación. El diseño térmico debe manejar tanto la operación continua a carga nominal como las condiciones de sobrecarga transitoria durante el arranque o la aceleración del motor.
El montaje de semiconductores de potencia determina la resistencia térmica de la unión al ambiente. Los dispositivos montados en PCB dependen de la dispersión de cobre y las vías térmicas para conducir el calor; los diseños de mayor potencia montan dispositivos en disipadores de calor o placas frías con material de interfaz térmica. El diseño de PCB térmico debe proporcionar rutas térmicas adecuadas dentro de las limitaciones de diseño.
Los controladores de motor a menudo operan en espacios cerrados (carcasas de motor, gabinetes de equipos o compartimentos de vehículos) donde la temperatura ambiente puede alcanzar los 85 °C o más. La selección de componentes y el diseño térmico deben tener en cuenta estos ambientes elevados mientras mantienen una operación confiable.
Elementos de diseño térmico
- Ruta de resistencia térmica: Diseñe la resistencia térmica de unión a ambiente consistente con la disipación de potencia y los límites de temperatura.
- Peso de cobre: 2-4 oz de cobre en áreas de potencia para transporte de corriente y dispersión térmica.
- Matrices de vías térmicas: Las matrices de vías debajo de los paquetes de potencia reducen la resistencia térmica a las capas internas.
- Integración de disipador de calor: Los diseños de alta potencia montan semiconductores en disipadores de calor externos a través de material de interfaz térmica.
- Detección de temperatura: Los termistores NTC cerca de los dispositivos de potencia permiten la protección térmica.
- Definición de reducción: Especificación clara de la capacidad de corriente frente a la temperatura ambiente.
Enfoques de cumplimiento de EMC
Los controladores de motor generan EMI a partir de conmutación de alta frecuencia y se irradian a través de cables de motor que actúan como antenas. Cumplir con los requisitos de EMC implica técnicas de filtrado, blindaje y diseño coordinadas a través de la etapa de potencia, los circuitos de control y las interconexiones del sistema.
El filtrado de emisiones conducidas en la entrada de CC utiliza choques de modo común y condensadores diferenciales para atenuar las emisiones de la conmutación PWM. El diseño del filtro debe lograr la atenuación requerida mientras maneja la corriente del motor sin saturación. Los procesos de prueba de EMC verifican la efectividad del filtro en todo el rango operativo.
Las emisiones del cable del motor dependen de las tasas de borde de conmutación, la longitud del cable y el blindaje. Los filtros de salida (filtros dV/dt o de onda sinusoidal) ralentizan las transiciones de voltaje de salida para reducir el contenido de alta frecuencia. Estos filtros también protegen el aislamiento del motor de los picos de voltaje que ocurren con longitudes de cable largas.
Enfoques de diseño de EMC
- Filtrado de entrada: Filtrado de modo común y modo diferencial de múltiples etapas en entrada de CC o CA.
- Control de salida dV/dt: Los filtros dV/dt limitan la velocidad de aumento de voltaje de salida; reducen las corrientes de rodamiento del motor y la EMI.
- Blindaje de cables: Los cables de motor blindados con terminación adecuada reducen las emisiones radiadas.
- Selección de frecuencia PWM: Evite frecuencias PWM que creen emisiones en frecuencias de receptor sensibles.
- Espectro ensanchado: PWM de espectro ensanchado reduce las emisiones máximas a frecuencia PWM y armónicos.
- Integridad del plano de tierra: Los planos de tierra continuos minimizan las áreas de bucle y controlan las rutas de retorno.
Resumen
El diseño de PCB de controlador de motor equilibra la eficiencia de manejo de potencia, la precisión de control, la gestión térmica y el cumplimiento de EMC en aplicaciones desde unidades integradas compactas hasta controladores industriales con todas las funciones. Los principios fundamentales se aplican independientemente de la escala: minimizar la inductancia del bucle de conmutación, mantener la integridad de la señal para la detección y el control, y gestionar las rutas térmicas para una operación confiable. Los detalles de implementación varían con el nivel de potencia, el tipo de motor y los requisitos de aplicación, pero los diseños exitosos comparten la atención a estas preocupaciones centrales de ingeniería.