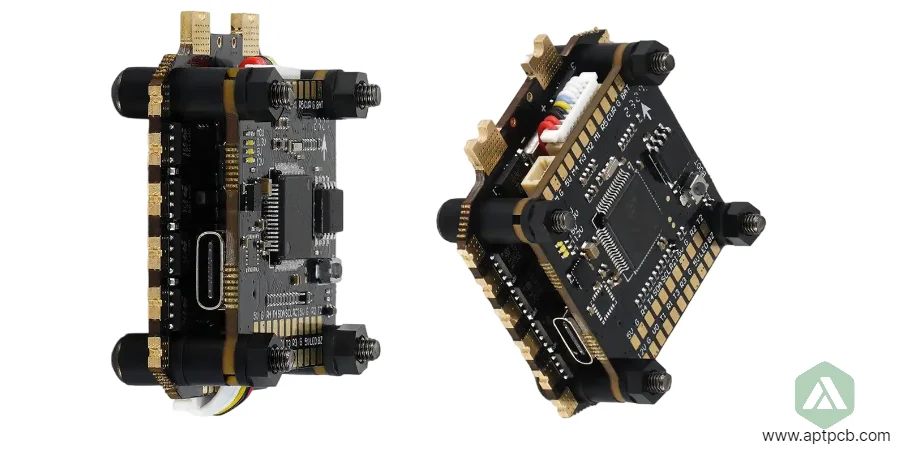
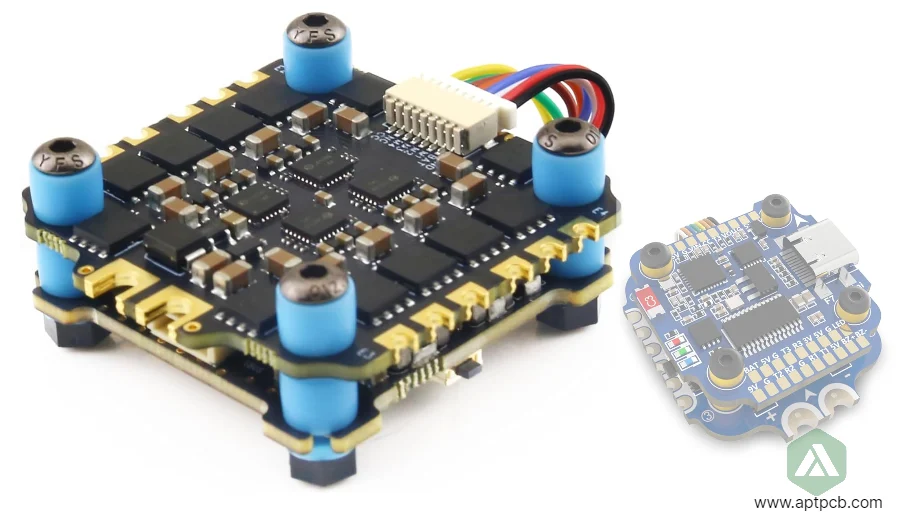
Les assemblages de contrôleurs de vol intègrent des unités de mesure inertielle (IMU) haute performance, des capteurs barométriques, des magnétomètres, des récepteurs GPS et des microcontrôleurs exécutant des algorithmes de fusion de capteurs à des fréquences de mise à jour de 1 à 8 kHz, offrant une estimation précise de l'attitude, une navigation autonome et une stabilisation de vol pour les quadricoptères grand public, les drones d'inspection commerciaux et les UAV de livraison autonomes nécessitant un fonctionnement fiable, maintenant une précision d'attitude de ±1°, une précision de positionnement GPS de <5 cm et un fonctionnement à sécurité intégrée protégeant contre les défaillances de capteurs, la perte de communication ou les erreurs logicielles sur des milliers d'heures de vol.
Chez APTPCB, nous fournissons des services spécialisés d'assemblage de contrôleurs de vol mettant en œuvre une intégration de capteurs haute fiabilité, une exécution d'algorithmes validée et des procédures de calibration complètes avec des capacités d'assemblage clé en main. Notre expertise prend en charge les contrôleurs de course nécessitant des fréquences de boucle de 8 kHz jusqu'aux autopilotes commerciaux exigeant une navigation par points de cheminement et une fonctionnalité de retour au point de départ, avec une fabrication validée garantissant des performances de capteur et une exécution d'algorithmes constantes.
Réalisation d'une intégration et d'une calibration précises des capteurs
La performance des contrôleurs de vol dépend fondamentalement de la précision des capteurs, car les erreurs de biais du gyroscope provoquent une dérive d'attitude, le désalignement de l'accéléromètre crée des erreurs de position, et les interférences du magnétomètre entraînent une déviation de cap, pouvant potentiellement causer des pannes de navigation ou un vol instable. Atteindre une stabilité de biais de gyroscope de <0,5°/s, une précision d'accéléromètre de <50 mg et une précision de cap de <5° sur des plages de température de -40 à +85°C tout en maintenant une synchronisation temporelle au niveau de la microseconde présente des défis techniques importants. Une performance inadéquate des capteurs entraîne une dérive d'attitude nécessitant une correction manuelle continue, des erreurs de position affectant la navigation autonome, ou une instabilité complète du vol provoquant des accidents — impactant directement la sécurité opérationnelle, le succès de la mission et la satisfaction du client, en particulier pour les applications commerciales nécessitant un fonctionnement autonome.
Chez APTPCB, nos services d'assemblage mettent en œuvre une intégration de capteurs validée, atteignant des spécifications de précision grâce à une calibration complète.
Techniques clés d'intégration de capteurs
- Sélection d'IMU haute performance : Capteurs MEMS de qualité industrielle (Invensense ICM-42688, Bosch BMI088) atteignant une stabilité de biais de <0,5°/s et des fréquences d'échantillonnage de 1000Hz+ supportant des boucles de stabilisation à large bande passante avec validation de la qualité des tests.
- Montage de capteurs de précision : Placement automatisé (pick-and-place) avec une précision de ±25μm assurant l'alignement de l'IMU et maintenant une tolérance de montage <1°, critique pour la précision de la fusion de capteurs.
- Redondance multi-capteurs : Configurations IMU doubles ou triples permettant la détection de défaillance de capteur et la poursuite du fonctionnement malgré des défaillances de capteur unique, supportant les applications critiques pour la sécurité.
- Compensation de température : Calibrage en usine mesurant les caractéristiques des capteurs sur différentes plages de température, stockant les paramètres de compensation dans une mémoire non volatile, maintenant la précision malgré les variations environnementales.
- Protocoles de calibrage à six points : Calibrage automatisé mesurant les sorties des capteurs dans plusieurs orientations, calculant les facteurs de décalage et d'échelle, atteignant la précision spécifiée sur toute la plage de mesure.
- Tests de validation : Tests post-assemblage sur des tables de taux de précision et des plateformes de vibration validant la précision des capteurs et la performance des algorithmes dans toutes les conditions de fonctionnement grâce à des procédures de tests fonctionnels.
Performance des capteurs calibrés
En mettant en œuvre des processus de fabrication de précision, des procédures de calibrage validées et des tests de capteurs complets supportés par des équipements de calibrage automatisés, APTPCB fournit des contrôleurs de vol atteignant les spécifications de précision des capteurs, supportant un contrôle de vol stable, une navigation précise et un fonctionnement autonome fiable pour les applications de drones (UAV) grand public, commerciales et militaires.
Exécution d'algorithmes de fusion de capteurs et de contrôle à haut débit
Les contrôleurs de vol modernes exécutent des algorithmes sophistiqués de fusion de capteurs (filtres de Kalman étendus, filtres complémentaires) combinant les données de gyroscope, d'accéléromètre, de magnétomètre et de GPS à des taux de mise à jour de 1 à 8 kHz, fournissant une estimation optimale de l'état, rejetant le bruit des capteurs tout en suivant des dynamiques rapides. L'exécution des algorithmes nécessite des microcontrôleurs haute performance (ARM Cortex-M7 à 400-600 MHz) avec des unités à virgule flottante exécutant des opérations mathématiques complexes dans des contraintes de temps strictes. Une performance de calcul inadéquate entraîne des retards dans la boucle de contrôle dégradant les marges de stabilité, une bande passante de filtre insuffisante permettant au bruit d'affecter la précision du contrôle, ou une gigue de synchronisation créant des oscillations — impactant directement la qualité de vol, la réactivité du contrôle et la sécurité opérationnelle, en particulier pour les profils de vol agressifs dans les applications de course ou d'inspection industrielle.
Chez APTPCB, notre fabrication prend en charge des conceptions avancées de contrôleurs de vol exécutant des algorithmes exigeants de manière fiable.
Techniques de mise en œuvre de l'exécution d'algorithmes
- Intégration de MCU haute performance : Microcontrôleurs ARM Cortex-M7 (STM32H7, NXP i.MX RT) à 480-600 MHz avec FPU double précision exécutant des algorithmes de fusion de capteurs et de contrôle avec une marge de calcul supportant l'expansion des fonctionnalités grâce à la fabrication selon un système qualité.
- Système d'exploitation en temps réel : RTOS déterministe (FreeRTOS, ChibiOS) assurant une planification prévisible des tâches et maintenant une synchronisation de boucle cohérente malgré des charges de calcul variables.
- Optimisation DMA et des périphériques : Accès direct à la mémoire pour le transfert de données de capteurs et communications SPI/I2C basées sur DMA, minimisant la surcharge du CPU et maximisant la puissance de traitement disponible pour les algorithmes de contrôle.
- Optimisation en virgule flottante : Implémentation d'algorithmes utilisant une FPU matérielle, maintenant la précision tout en atteignant les exigences de performance en temps réel.
- Validation de la synchronisation : Profilage du temps d'exécution garantissant que l'exécution de l'algorithme dans le pire des cas se termine dans la période de boucle avec une marge adéquate, prévenant les violations de synchronisation causant l'instabilité.
- Tests de validation d'algorithmes : Essais en vol dans diverses conditions validant les performances de contrôle, les marges de stabilité et la gestion des modes de défaillance, répondant aux spécifications sur l'ensemble de l'enveloppe opérationnelle.
Performances d'algorithmes validées
Grâce à la sélection de matériel haute performance, à une implémentation logicielle optimisée et à des tests de validation complets coordonnés avec les processus de fabrication, APTPCB permet aux contrôleurs de vol d'exécuter des algorithmes de contrôle avancés, atteignant les fréquences de boucle spécifiées, les marges de stabilité et la précision de contrôle, supportant ainsi les drones de course grand public haute performance jusqu'aux plateformes autonomes commerciales critiques pour la sécurité.
Intégration du GPS et des capacités de navigation autonome
Les opérations de vol autonome nécessitent une intégration GPS fournissant des informations de position, de vitesse et de temps, permettant la navigation par points de cheminement, la fonctionnalité de retour à la base et les modes de maintien de position. Atteindre une précision de positionnement CEP (erreur circulaire probable) inférieure à 5 m, une estimation de vitesse inférieure à 0,5 m/s et un suivi satellitaire fiable malgré le multitrajets, les interférences ou une visibilité limitée du ciel présente des défis importants. Des performances GPS inadéquates entraînent des erreurs de navigation affectant les missions autonomes, une dérive de position provoquant des incidents de fuite, ou des situations de perte de GPS nécessitant une récupération manuelle – ce qui a un impact significatif sur la sécurité opérationnelle, la fiabilité des missions et la viabilité commerciale, en particulier pour les applications de livraison, d'arpentage ou d'inspection nécessitant une navigation autonome précise.
Chez APTPCB, notre assemblage met en œuvre une intégration GPS validée, prenant en charge des opérations autonomes fiables.
Techniques d'intégration GPS
- Récepteurs GPS haute sensibilité : Modules GPS modernes (u-blox M10, Quectel L96) prenant en charge le GNSS multi-constellations (GPS, GLONASS, Galileo, BeiDou) améliorant la disponibilité des satellites et la précision de positionnement grâce au prototypage d'assemblage NPI.
- Implémentation du GPS RTK : GPS cinématique en temps réel atteignant une précision de positionnement au centimètre près, prenant en charge les applications d'agriculture de précision, d'arpentage et d'inspection nécessitant une haute précision.
- Fusion de capteurs GPS/IMU : Intégration étroitement couplée combinant la position/vitesse GPS avec les mesures IMU, offrant une navigation continue malgré les pannes GPS temporaires ou la dégradation du signal.
- Optimisation du placement de l'antenne : Emplacement stratégique de l'antenne GPS maximisant la visibilité du ciel tout en minimisant les interférences des moteurs, des ESC ou des émetteurs RF, maintenant ainsi la qualité du signal.
- Détection de brouillage GPS : Surveillance de la force du signal et du nombre de satellites détectant les interférences ou le brouillage, permettant un retour à la navigation basée sur l'IMU ou un atterrissage contrôlé.
- Calibrage de la boussole : Calibrage automatisé du magnétomètre compensant les distorsions de fer dur et doux provenant de la structure et de l'électronique du drone, permettant une estimation précise du cap et supportant la navigation sans GPS.
Performances de navigation fiables
En mettant en œuvre une intégration GPS validée, des algorithmes de fusion de capteurs et des procédures de calibrage complètes soutenues par une expertise en fabrication, APTPCB permet aux contrôleurs de vol d'atteindre des spécifications de précision et de fiabilité de navigation supportant les opérations commerciales autonomes, la navigation par points de cheminement et la fonctionnalité de retour à la base pour diverses applications et profils de mission de drones.
Fournir des fonctions complètes de sécurité et de protection contre les pannes
Les contrôleurs de vol gérant des opérations autonomes doivent détecter et réagir aux défaillances, y compris les dysfonctionnements de capteurs, la perte de communication, l'épuisement de la batterie ou les pannes de moteur, en mettant en œuvre des procédures de sécurité intégrées protégeant les aéronefs et le personnel au sol. Une mise en œuvre inadéquate de la sécurité entraîne des descentes incontrôlées dues à une perte de signal, des incidents de fuite dus à des défaillances de navigation, ou des crashs dus à des pannes de moteur non détectées — créant des risques pour la sécurité, des problèmes de conformité réglementaire et une exposition significative à la responsabilité, en particulier pour les opérations commerciales nécessitant la conformité FAA Part 107 ou EASA.
Chez APTPCB, notre fabrication prend en charge les conceptions de contrôleurs de vol critiques pour la sécurité, en mettant en œuvre des fonctionnalités de protection complètes.
Techniques de mise en œuvre de la sécurité
- Architecture de capteurs redondante : Configurations doubles d'IMU, de baromètre ou de magnétomètre permettant la vérification croisée des capteurs, la détection des défaillances et le maintien du fonctionnement malgré les dysfonctionnements d'un seul capteur grâce au contrôle qualité de la production de masse.
- Procédures en cas de perte de signal : Actions de sécurité configurables (retour à la base, atterrissage immédiat, vol stationnaire) activées en cas de perte de communication, assurant une récupération contrôlée malgré une défaillance de la liaison radio.
- Surveillance de la batterie : Surveillance de la tension et du courant détectant les conditions de batterie faible, déclenchant des avertissements et un atterrissage forcé, empêchant la décharge excessive de la batterie qui pourrait provoquer un crash.
- Geofencing Implementation: Limites virtuelles empêchant le vol au-delà des zones autorisées, soutenant la conformité réglementaire et prévenant les incidents de perte de contrôle.
- Pre-Flight Safety Checks: Vérifications automatisées validant la fonctionnalité des capteurs, le verrouillage GPS, la tension de la batterie et la correction de la configuration avant d'autoriser le décollage, empêchant les opérations avec des systèmes dégradés.
- Flight Logging and Analysis: Enregistrement complet des données capturant les données des capteurs, les sorties de contrôle et les événements système, soutenant l'enquête sur les incidents et l'amélioration continue de la sécurité.
Opération critique pour la sécurité
Grâce à la mise en œuvre complète de fonctionnalités de sécurité, à des algorithmes de détection de défaillance validés et à des procédures de test approfondies soutenues par des systèmes de gestion de la qualité, APTPCB permet aux contrôleurs de vol de répondre aux exigences de sécurité, prenant en charge les opérations commerciales de drones, l'utilisation récréative et les applications spécialisées nécessitant un vol autonome fiable avec une protection complète contre les défaillances.
Activation de la communication et de l'intégration de la télémétrie
Les contrôleurs de vol interagissent avec les récepteurs RC, les radios de télémétrie, les ordinateurs compagnons et les stations de contrôle au sol, échangeant des commandes de contrôle, des données de télémétrie et des paramètres de mission, ce qui nécessite des communications fiables à faible latence prenant en charge le contrôle manuel, les missions autonomes et la surveillance en temps réel. Une implémentation de communication inadéquate entraîne une latence de contrôle affectant la qualité de vol, des pertes de télémétrie empêchant la surveillance, ou une incompatibilité limitant l'intégration du système – ce qui a un impact significatif sur l'opérabilité, la flexibilité des missions et la satisfaction client, en particulier pour les applications commerciales nécessitant une intégration avec des systèmes d'entreprise.
Chez APTPCB, notre assemblage prend en charge des interfaces de communication complètes permettant l'intégration du système.
Techniques d'intégration de la communication
- Prise en charge de plusieurs protocoles : Interfaces de récepteur PWM, PPM, SBUS, CRSF prenant en charge divers systèmes RC, plus UART/I2C/CAN pour les périphériques, permettant une configuration système flexible.
- Implémentation du protocole MAVLink : Protocole de télémétrie standard de l'industrie permettant l'intégration avec les stations de contrôle au sol (Mission Planner, QGroundControl) prenant en charge la planification de mission et la surveillance en temps réel.
- Interface d'ordinateur compagnon : Connexions série ou Ethernet haute vitesse permettant l'intégration avec des ordinateurs embarqués (Raspberry Pi, Nvidia Jetson) prenant en charge la vision par ordinateur, le traitement IA ou les applications personnalisées.
- Blackbox Logging: Enregistrement de données à haute vitesse capturant les données de capteurs et de contrôle à plein régime, supportant l'analyse post-vol et l'optimisation des performances.
- OSD Integration: Interfaces d'affichage à l'écran (OSD) superposant la télémétrie sur la vidéo FPV, supportant la surveillance en temps réel pendant les opérations de vol manuel.
- Wireless Configuration: Interfaces WiFi ou Bluetooth permettant l'ajustement sans fil des paramètres et les mises à jour du micrologiciel, simplifiant les opérations sur le terrain grâce à l'approvisionnement en composants de modules RF certifiés.
Connectivité Complète
Grâce à des interfaces de communication validées, un support de protocole et des tests d'intégration système coordonnés avec les processus de fabrication, APTPCB permet aux contrôleurs de vol d'atteindre une communication fiable supportant le contrôle manuel, les opérations autonomes et l'intégration système pour les applications de course FPV grand public, d'inspection commerciale et de livraison autonome par drone.
Soutien au développement rapide et à la mise à l'échelle de la production
Le développement de contrôleurs de vol nécessite un prototypage rapide pour soutenir le développement d'algorithmes et les tests en vol, une transition rapide vers la production pilote validant les processus de fabrication, et une production en grand volume évolutive répondant à la demande sur les marchés grand public et commerciaux. Des approches de fabrication inflexibles entraînent des cycles de développement prolongés retardant l'introduction sur le marché, des problèmes de qualité pendant la montée en puissance de la production affectant la fiabilité, ou une capacité insuffisante limitant la croissance de l'entreprise — impactant significativement la position concurrentielle et les opportunités de revenus sur les marchés des drones en évolution rapide.
Chez APTPCB, nous offrons un support complet, du prototype à la production en volume.
Support au développement et à la production
Services de prototypage rapide
- Assemblage rapide livrant des prototypes fonctionnels en 5 à 7 jours, supportant les cycles itératifs de développement d'algorithmes et de tests en vol.
- Retour d'information sur la conception pour la fabrication identifiant les problèmes potentiels, permettant l'optimisation avant l'engagement de production.
- Modifications de conception flexibles prenant en charge les mises à jour d'algorithmes, les mises à niveau de capteurs ou les ajouts de fonctionnalités tout au long de la phase de développement.
- Tests et étalonnage complets supportant les tests en vol et les activités de validation.
Capacités de production en volume
- Processus d'assemblage et d'étalonnage automatisés atteignant une qualité constante sur des milliers d'unités, supportant les programmes grand public et commerciaux.
- Contrôle statistique des processus surveillant les paramètres d'étalonnage et les résultats des tests, assurant la cohérence de la production et identifiant les dérives de processus.
- Mise à l'échelle flexible de la capacité, s'adaptant à une croissance de la demande de centaines à des centaines de milliers annuellement grâce aux services de revêtement conforme de PCB et de protection.
- Gestion de la chaîne d'approvisionnement maintenant la disponibilité des composants, soutenant une production ininterrompue malgré les pénuries à l'échelle de l'industrie.
- Documentation et traçabilité complètes soutenant l'analyse de garantie, l'enquête sur les défaillances et l'amélioration continue.
Support complet du cycle de vie
Grâce à un support de développement complet, des processus de fabrication validés et des capacités de production évolutives coordonnées avec des équipes de gestion de programme expérimentées, APTPCB permet aux fabricants de contrôleurs de vol de lancer, d'intensifier et de maintenir avec succès des produits pour les drones de course grand public, les plateformes d'inspection commerciales et les UAV de livraison autonomes, soutenant ainsi la croissance commerciale et le succès sur le marché mondial. Les assemblages de contrôleurs de vol représentent l'aboutissement de l'intégration avancée de capteurs, de l'exécution d'algorithmes en temps réel et de la conception de systèmes critiques pour la sécurité, nécessitant une expertise de fabrication spécialisée, des tests de validation complets et une gestion continue de la qualité. Grâce à l'intégration de capteurs de précision, à des procédures de calibration validées et à des protocoles de test complets, soutenus par des capacités de fabrication de PCB spéciales, APTPCB permet aux fabricants de drones de déployer des contrôleurs de vol fiables, atteignant les spécifications de performance, les exigences de sécurité et la fiabilité opérationnelle, soutenant ainsi des produits de consommation réussis, des opérations commerciales et des applications spécialisées sur les marchés mondiaux des drones.