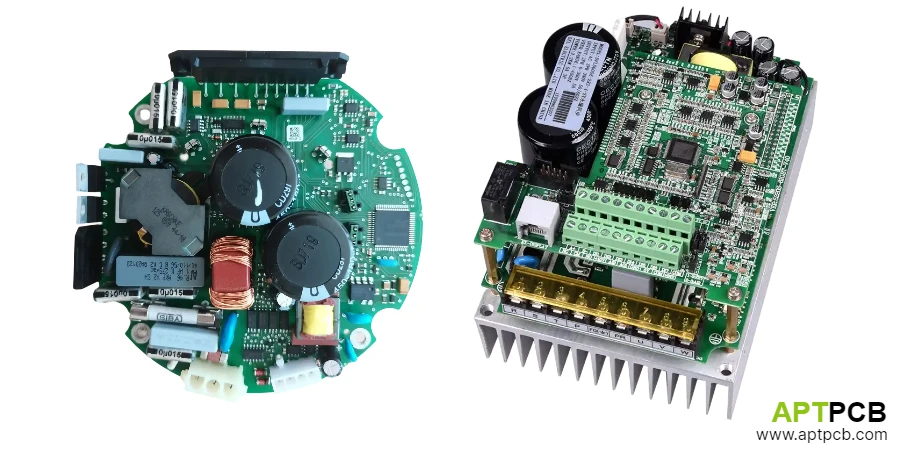
Les contrôleurs de moteur couvrent un spectre allant des modules intégrés compacts aux entraînements industriels complets, chacun nécessitant des conceptions de PCB optimisées pour leur type de moteur cible, leur plage de puissance et leurs exigences d'application. Les défis fondamentaux – efficacité de la commutation de puissance, précision du contrôle, gestion thermique et conformité CEM – s'appliquent à cette gamme avec une importance variable.
Ce guide aborde les principes de conception de PCB qui s'appliquent aux contrôleurs de moteur dans les applications BLDC, pas à pas et à induction AC dans les environnements industriels.
Dans ce guide
- Sélection de la topologie de l'étage de puissance
- Intégration du pilote de grille
- Détection de position et de courant
- Mise en œuvre du contrôle numérique
- Stratégies de gestion thermique
- Approches de conformité CEM
Sélection de la topologie de l'étage de puissance
La topologie de l'étage de puissance du contrôleur de moteur dépend du type de moteur, de la plage de tension et des exigences de performance. Les onduleurs triphasés servent aux moteurs BLDC et à induction AC ; les ponts en H ou les pilotes spécialisés gèrent les moteurs pas à pas ; les configurations monophasées fonctionnent pour le contrôle simple de moteur CC. Chaque topologie présente des exigences de disposition de PCB distinctes.
Les onduleurs triphasés utilisent six dispositifs de commutation dans une configuration en pont à trois branches. L'étage de puissance peut utiliser des MOSFET ou IGBT discrets, des modules de puissance intégrés (IPM) ou des modules de puissance intelligents avec pilotes de grille intégrés. Les approches basées sur des modules simplifient la disposition à des niveaux de puissance plus élevés, tandis que les solutions discrètes offrent flexibilité et optimisation des coûts pour les conceptions à faible puissance.
Pour les conceptions de PCB multicouches, la disposition de l'étage de puissance doit minimiser l'inductance de boucle du bus CC – l'inductance parasite dans le chemin du condensateur de bus à travers la paire de dispositifs de commutation et retour. Chaque nanohenry d'inductance de boucle crée un dépassement de tension lors de la commutation qui sollicite les dispositifs et augmente les EMI.
Considérations de conception de topologie
- Onduleur triphasé : Standard pour le contrôle de moteur BLDC et AC ; six commutateurs avec commande de grille complémentaire.
- Pont en H : Quatre commutateurs par phase ; utilisé pour les moteurs pas à pas ou les moteurs à balais CC.
- Modules intégrés : Les IPM combinent plusieurs commutateurs avec des pilotes de grille ; simplifient la disposition mais limitent l'optimisation thermique.
- Barre omnibus vs PCB : Les conceptions haute puissance peuvent utiliser des barres omnibus laminées plutôt que du cuivre PCB pour la distribution électrique.
- Exigences d'amortisseur : Dimensionnement de l'amortisseur dépendant de la topologie basé sur les caractéristiques du dispositif et l'inductance de la disposition.
- Frein/Régénération : Provision de topologie pour le freinage régénératif ou hacheur de freinage pour une décélération contrôlée.
Intégration du pilote de grille
Les pilotes de grille traduisent les signaux de commande basse tension en courant de commande nécessaire pour commuter les semi-conducteurs de puissance. Le niveau d'intégration va des étages de pilote discrets aux circuits intégrés de pilote de grille intelligents entièrement intégrés avec des fonctionnalités de protection et de diagnostic.
Les pilotes de grille côté haut nécessitent soit des alimentations isolées, soit des circuits d'amorçage qui dérivent la puissance de commande de grille de la sortie commutée. Les conceptions d'amorçage offrent un coût inférieur mais imposent des limites de rapport cyclique – le condensateur d'amorçage ne se recharge que lorsque le dispositif côté bas conduit. Les applications de contrôle de moteur avec un rapport cyclique côté haut potentiel de 100 % (régénération ou injection CC) peuvent nécessiter des alimentations isolées.
La disposition du PCB pour les pilotes de grille doit minimiser la zone de boucle de commande de grille tout en maintenant l'espacement d'isolation. Le chemin du courant de commande de grille comprend la sortie du pilote, la résistance de grille, les bornes grille-source et le chemin de retour. L'inductance dans ce chemin provoque des oscillations et affecte les caractéristiques de commutation.
Conception de pilote de grille
- Amorçage vs Isolé : Amorçage pour le contrôle moteur standard ; alimentations isolées pour les applications nécessitant une conduction côté haut sans commutation périodique côté bas.
- Sélection de la résistance de grille : Équilibre la vitesse de commutation contre les oscillations et les EMI ; les résistances d'activation et de désactivation séparées optimisent indépendamment.
- Pince Miller : La pince Miller active ou la polarisation de grille négative empêche l'activation parasite par couplage dV/dt.
- Protection DESAT : La détection de désaturation pour les IGBT offre une protection rapide contre les courts-circuits.
- Correspondance de propagation : La correspondance de délai de propagation côté haut et côté bas empêche le tir traversant.
- Génération de temps mort : Insertion de temps mort matériel comme secours à la programmation de temps mort logiciel.
Détection de position et de courant
Les algorithmes de contrôle moteur nécessitent une rétroaction précise de position et de courant. La détection de position utilise des capteurs à effet Hall pour le contrôle BLDC à six étapes, des codeurs optiques ou magnétiques pour le contrôle orienté champ, ou des techniques sans capteur qui estiment la position à partir de la FEM inverse ou des signatures de courant. La détection de courant permet le contrôle du couple et la protection contre les surintensités.
Les interfaces de capteur à effet Hall reçoivent des signaux numériques basse tension de capteurs montés dans le moteur. Le PCB doit conditionner ces signaux contre la captation de bruit des câbles moteur et de la commutation de puissance. La transmission différentielle ou le conditionnement du signal au niveau du moteur réduit la sensibilité au bruit pour les longs parcours de câbles.
Les exigences de précision de détection de courant varient selon l'approche de contrôle. Le contrôle BLDC à six étapes tolère une précision de détection de courant de ±5 %, tandis que le contrôle orienté champ haute performance bénéficie d'une précision de ±1 %. La détection basée sur shunt avec amplificateurs isolés atteint cette précision à moindre coût que les capteurs de courant à effet Hall, avec les processus de test et qualité assurant la précision de l'étalonnage de détection.
Mise en œuvre de la détection
- Interface de capteur Hall : Entrées de déclencheur de Schmitt avec filtrage pour l'immunité au bruit ; résistances de pull-up dimensionnées pour la longueur du câble.
- Interface de codeur : Récepteurs de ligne différentiels pour codeurs incrémentaux ; interface série pour codeurs absolus.
- Placement du shunt de courant : Le shunt de liaison CC mesure le courant total ; les shunts de branche permettent la reconstruction du courant de phase.
- Amplificateurs isolés : Indice d'isolation renforcé pour les amplificateurs mesurant les courants côté haut.
- Timing d'échantillonnage : Échantillonnage ADC synchronisé avec PWM pour mesurer pendant les périodes de courant stable.
- Techniques sans capteur : Détection de passage à zéro de la FEM ou injection haute fréquence pour l'estimation de position.
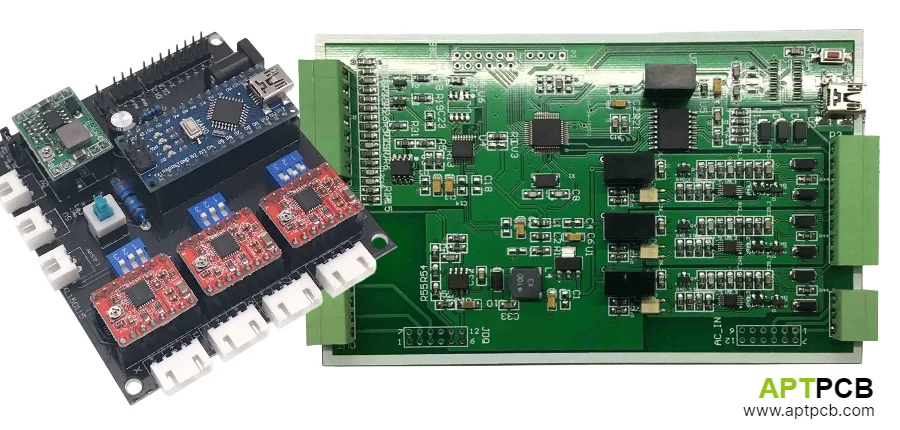
Mise en œuvre du contrôle numérique
Le contrôle moteur numérique s'exécute sur des microcontrôleurs ou DSP avec des périphériques spécialisés pour la génération PWM, la synchronisation ADC et le traitement du codeur. Le PCB doit prendre en charge ces fonctions tout en minimisant le couplage de bruit des étages de puissance aux circuits numériques.
La génération PWM nécessite des minuteries matérielles avec des fonctionnalités pour les sorties complémentaires, l'insertion de temps mort et le déclenchement ADC synchronisé. La PWM alignée au centre réduit l'ondulation de courant et permet un échantillonnage à mi-porteuse pour une mesure précise du courant. La résolution PWM et la sélection de la fréquence porteuse affectent la bande passante de contrôle réalisable et le bruit audible.
L'exécution de l'algorithme de contrôle se produit pendant la période du cycle PWM – généralement 50-100 μs pour une PWM de 10-20 kHz. La séquence complète d'échantillonnage ADC, de calcul de contrôle et de mise à jour PWM doit se terminer dans cette fenêtre avec un timing déterministe. Les conceptions de PCB de contrôle industriel doivent prendre en charge les exigences de performance en temps réel.
Architecture de contrôle numérique
- Sélection du processeur : DSP de contrôle moteur ou MCU avec PWM, ADC et périphériques de codeur intégrés.
- Périphérique PWM : Le matériel prend en charge les sorties complémentaires, le temps mort programmable, les entrées de défaut et les déclencheurs ADC.
- Performance ADC : Résolution minimale de 12 bits ; temps de conversion de 1-2 μs pour les applications de boucle de courant.
- Matériel de codeur : Le décodeur en quadrature compte sans intervention logicielle ; la fonction de capture horodate les impulsions d'index.
- Interface de communication : CAN, Ethernet ou bus de terrain pour l'entrée de commande et les diagnostics.
- Chien de garde et défaut : Chien de garde matériel et entrées de défaut qui désactivent la PWM indépendamment du logiciel.
Stratégies de gestion thermique
Les contrôleurs de moteur dissipent la puissance en pertes de commutation et de conduction qui varient selon la charge et la fréquence de commutation. La conception thermique doit gérer à la fois le fonctionnement continu à charge nominale et les conditions de surcharge transitoire pendant le démarrage ou l'accélération du moteur.
Le montage des semi-conducteurs de puissance détermine la résistance thermique de la jonction à l'ambiant. Les dispositifs montés sur PCB reposent sur l'étalement du cuivre et les vias thermiques pour conduire la chaleur ; les conceptions à plus haute puissance montent les dispositifs sur des dissipateurs thermiques ou des plaques froides avec un matériau d'interface thermique. La conception de PCB thermique doit fournir des chemins thermiques adéquats dans les contraintes de disposition.
Les contrôleurs de moteur fonctionnent souvent dans des espaces clos – logements de moteur, armoires d'équipement ou compartiments de véhicules – où la température ambiante peut atteindre 85°C ou plus. La sélection des composants et la conception thermique doivent tenir compte de ces températures ambiantes élevées tout en maintenant un fonctionnement fiable.
Éléments de conception thermique
- Chemin de résistance thermique : Concevoir la résistance thermique jonction-ambiant cohérente avec la dissipation de puissance et les limites de température.
- Poids du cuivre : 2-4 oz de cuivre dans les zones de puissance pour le transport de courant et l'étalement thermique.
- Réseaux de vias thermiques : Les réseaux de vias sous les boîtiers de puissance réduisent la résistance thermique vers les couches internes.
- Intégration du dissipateur thermique : Les conceptions haute puissance montent les semi-conducteurs sur des dissipateurs thermiques externes via un matériau d'interface thermique.
- Détection de température : Les thermistances NTC près des dispositifs de puissance permettent une protection thermique.
- Définition du déclassement : Spécification claire de la capacité de courant par rapport à la température ambiante.
Approches de conformité CEM
Les contrôleurs de moteur génèrent des EMI à partir de la commutation haute fréquence et rayonnent à travers les câbles moteur qui agissent comme des antennes. Répondre aux exigences CEM implique des techniques de filtrage, de blindage et de disposition coordonnées à travers l'étage de puissance, les circuits de contrôle et les interconnexions du système.
Le filtrage des émissions conduites à l'entrée CC utilise des selfs de mode commun et des condensateurs différentiels pour atténuer les émissions de la commutation PWM. La conception du filtre doit atteindre l'atténuation requise tout en gérant le courant moteur sans saturation. Les processus de test CEM vérifient l'efficacité du filtre sur la plage de fonctionnement.
Les émissions des câbles moteur dépendent des taux de flanc de commutation, de la longueur du câble et du blindage. Les filtres de sortie (filtres dV/dt ou onde sinusoïdale) ralentissent les transitions de tension de sortie pour réduire le contenu haute fréquence. Ces filtres protègent également l'isolation du moteur des pics de tension qui se produisent avec de longues longueurs de câble.
Approches de conception CEM
- Filtrage d'entrée : Filtrage multi-étages de mode commun et de mode différentiel à l'entrée CC ou CA.
- Contrôle dV/dt de sortie : Les filtres dV/dt limitent le taux de montée de la tension de sortie ; réduisent les courants de roulement du moteur et les EMI.
- Blindage de câble : Les câbles moteur blindés avec une terminaison appropriée réduisent les émissions rayonnées.
- Sélection de la fréquence PWM : Évitez les fréquences PWM qui créent des émissions aux fréquences de récepteur sensibles.
- Spectre étalé : La PWM à spectre étalé réduit les émissions de crête à la fréquence PWM et aux harmoniques.
- Intégrité du plan de masse : Les plans de masse continus minimisent les zones de boucle et contrôlent les chemins de retour.
Résumé
La conception de PCB de contrôleur de moteur équilibre l'efficacité de la gestion de puissance, la précision du contrôle, la gestion thermique et la conformité CEM à travers les applications, des entraînements intégrés compacts aux contrôleurs industriels complets. Les principes fondamentaux s'appliquent quelle que soit l'échelle – minimiser l'inductance de boucle de commutation, maintenir l'intégrité du signal pour la détection et le contrôle, et gérer les chemins thermiques pour un fonctionnement fiable. Les détails de mise en œuvre varient selon le niveau de puissance, le type de moteur et les exigences d'application, mais les conceptions réussies partagent une attention à ces préoccupations d'ingénierie fondamentales.