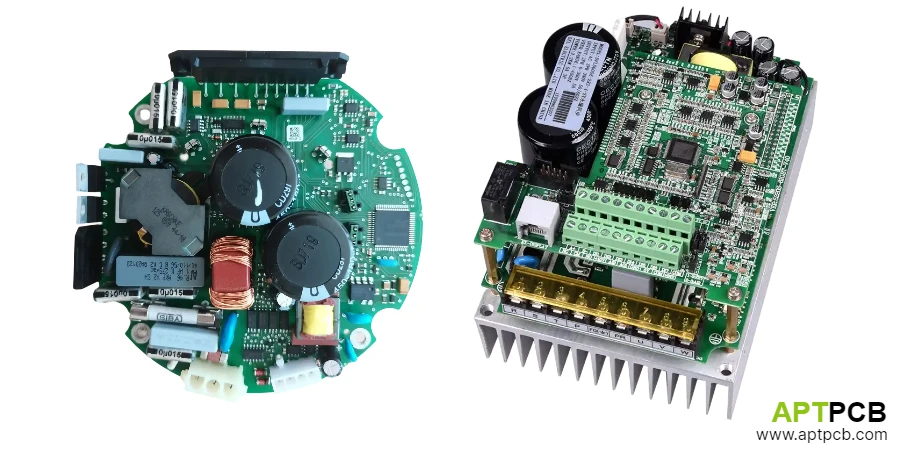
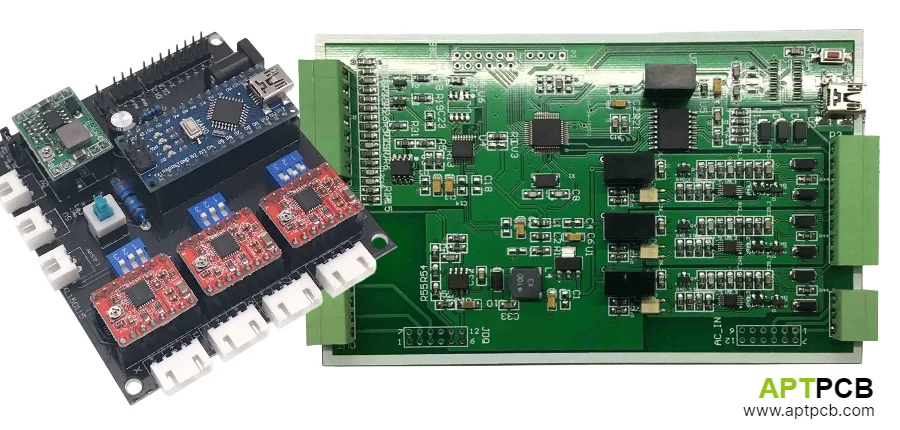
Motorsteuerungen reichen von kompakten integrierten Modulen bis hin zu voll ausgestatteten Industrieantrieben, die jeweils für ihren Zielmotortyp, Leistungsbereich und ihre Anwendungsanforderungen optimierte PCB-Designs erfordern. Die grundlegenden Herausforderungen – Effizienz der Leistungsschaltung, Regelgenauigkeit, Wärmemanagement und EMV-Konformität – gelten in diesem Bereich mit unterschiedlicher Gewichtung.
Dieser Leitfaden behandelt PCB-Designprinzipien, die für Motorsteuerungen in BLDC-, Schrittmacher- und AC-Induktionsanwendungen in industriellen Umgebungen gelten.
In diesem Leitfaden
- Auswahl der Leistungsendstufentopologie
- Gate-Treiber-Integration
- Positions- und Stromsensorik
- Implementierung der digitalen Steuerung
- Strategien für das Wärmemanagement
- EMV-Konformitätsansätze
Auswahl der Leistungsendstufentopologie
Die Topologie der Motorsteuerung-Leistungsendstufe hängt vom Motortyp, Spannungsbereich und den Leistungsanforderungen ab. Dreiphasen-Wechselrichter dienen BLDC- und Wechselstrom-Induktionsmotoren; H-Brücken oder spezialisierte Treiber handhaben Schrittmotoren; einphasige Konfigurationen funktionieren für einfache Gleichstrommotorsteuerungen. Jede Topologie stellt unterschiedliche Anforderungen an das PCB-Layout.
Dreiphasen-Wechselrichter verwenden sechs Schaltgeräte in einer dreibeinigen Brückenkonfiguration. Die Leistungsstufe kann diskrete MOSFETs oder IGBTs, integrierte Leistungsmodule (IPMs) oder intelligente Leistungsmodule mit integrierten Gate-Treibern verwenden. Modulbasierte Ansätze vereinfachen das Layout bei höheren Leistungspegeln, während diskrete Lösungen Flexibilität und Kostenoptimierung für Designs mit geringerer Leistung bieten.
Für Mehrlayer-PCB-Designs muss das Layout der Leistungsstufe die DC-Bus-Schleifeninduktivität minimieren – die parasitäre Induktivität im Pfad vom Buskondensator durch das Schaltgerätepaar und zurück. Jedes Nanohenry Schleifeninduktivität erzeugt während des Schaltens ein Spannungsüberschwingen, das Geräte belastet und EMI erhöht.
Überlegungen zum Topologiedesign
- Dreiphasen-Wechselrichter: Standard für BLDC- und AC-Motorsteuerung; sechs Schalter mit komplementärem Gate-Antrieb.
- H-Brücke: Vier Schalter pro Phase; verwendet für Schrittmotoren oder Gleichstrom-Bürstenmotoren.
- Integrierte Module: IPMs kombinieren mehrere Schalter mit Gate-Treibern; vereinfachen das Layout, begrenzen aber die thermische Optimierung.
- Sammelschiene vs. PCB: Hochleistungsdesigns können laminierte Sammelschienen anstelle von PCB-Kupfer für die Stromverteilung verwenden.
- Snubber-Anforderungen: Topologieabhängige Snubber-Dimensionierung basierend auf Gerätecharakteristik und Layoutinduktivität.
- Bremse/Rückgewinnung: Topologiebereitstellung für regeneratives Bremsen oder Brems-Chopper für kontrollierte Verzögerung.
Gate-Treiber-Integration
Gate-Treiber wandeln Niederspannungssteuersignale in den Ansteuerstrom um, der zum Schalten von Leistungshalbleitern benötigt wird. Der Integrationsgrad reicht von diskreten Treiberstufen bis hin zu voll integrierten intelligenten Gate-Treiber-ICs mit Schutz- und Diagnosefunktionen.
High-Side-Gate-Treiber erfordern entweder isolierte Versorgungen oder Bootstrap-Schaltungen, die Gate-Ansteuerleistung aus dem geschalteten Ausgang beziehen. Bootstrap-Designs bieten geringere Kosten, erlegen jedoch Arbeitszyklusgrenzen auf – der Bootstrap-Kondensator lädt sich nur auf, wenn das Low-Side-Gerät leitet. Motorsteuerungsanwendungen mit potenziellem 100 % High-Side-Arbeitszyklus (Rückgewinnung oder DC-Injektion) erfordern möglicherweise isolierte Versorgungen.
Das PCB-Layout für Gate-Treiber muss den Gate-Treiber-Schleifenbereich minimieren und gleichzeitig den Isolationsabstand einhalten. Der Gate-Antriebsstrompfad umfasst den Treiberausgang, den Gate-Widerstand, die Gate-Source-Klemmen und den Rückweg. Induktivität in diesem Pfad verursacht Klingeln und beeinflusst die Schalteigenschaften.
Gate-Treiber-Design
- Bootstrap vs. Isoliert: Bootstrap für Standardmotorsteuerung; isolierte Versorgungen für Anwendungen, die eine High-Side-Leitung ohne periodisches Low-Side-Schalten erfordern.
- Auswahl des Gate-Widerstands: Gleicht Schaltgeschwindigkeit gegen Klingeln und EMI aus; separate Einschalt- und Ausschaltwiderstände optimieren unabhängig voneinander.
- Miller-Klemme: Aktive Miller-Klemme oder negative Gate-Vorspannung verhindert ein falsches Einschalten durch dV/dt-Kopplung.
- DESAT-Schutz: Entsättigungserkennung für IGBTs bietet schnellen Kurzschlussschutz.
- Ausbreitungsanpassung: Anpassung der High-Side- und Low-Side-Ausbreitungsverzögerung verhindert Durchschießen.
- Totzeiterzeugung: Hardware-Totzeiteinfügung als Backup für Software-Totzeitprogrammierung.
Positions- und Stromsensorik
Motorsteuerungsalgorithmen erfordern ein genaues Positions- und Stromfeedback. Die Positionserfassung verwendet Hall-Sensoren für die sechsstufige BLDC-Steuerung, optische oder magnetische Encoder für die feldorientierte Steuerung oder sensorlose Techniken, die die Position aus Gegen-EMK oder Stromsignaturen schätzen. Die Stromerfassung ermöglicht Drehmomentregelung und Überstromschutz.
Hall-Sensorschnittstellen empfangen digitale Niederspannungssignale von im Motor montierten Sensoren. Das PCB muss diese Signale gegen Rauschaufnahme von Motorkabeln und Leistungsschalten konditionieren. Differenzielle Übertragung oder Signalkonditionierung am Motor reduziert die Rauschanfälligkeit für lange Kabelwege.
Die Genauigkeitsanforderungen an die Stromerfassung variieren je nach Steuerungsansatz. Die sechsstufige BLDC-Steuerung toleriert eine Genauigkeit der Stromerfassung von ±5 %, während eine leistungsstarke feldorientierte Steuerung von einer Genauigkeit von ±1 % profitiert. Shunt-basierte Erfassung mit isolierten Verstärkern erreicht diese Genauigkeit zu geringeren Kosten als Hall-Effekt-Stromsensoren, wobei die Test- und Qualitätsprozesse die Genauigkeit der Erfassungskalibrierung sicherstellen.
Sensorik-Implementierung
- Hall-Sensorschnittstelle: Schmitt-Trigger-Eingänge mit Filterung für Störfestigkeit; Pull-up-Widerstände für Kabellänge dimensioniert.
- Encoder-Schnittstelle: Differenzielle Leitungsempfänger für Inkrementalgeber; serielle Schnittstelle für Absolutwertgeber.
- Strom-Shunt-Platzierung: DC-Link-Shunt misst Gesamtstrom; Bein-Shunts ermöglichen Phasenstromrekonstruktion.
- Isolierte Verstärker: Verstärkte Isolationsbewertung für Verstärker, die High-Side-Ströme messen.
- Sampling-Timing: ADC-Sampling synchronisiert mit PWM, um während stabiler Stromperioden zu messen.
- Sensorlose Techniken: BEMF-Nulldurchgangserkennung oder Hochfrequenzinjektion für Positionsschätzung.
Implementierung der digitalen Steuerung
Die digitale Motorsteuerung läuft auf Mikrocontrollern oder DSPs mit spezialisierten Peripheriegeräten für PWM-Erzeugung, ADC-Synchronisation und Encoder-Verarbeitung. Das PCB muss diese Funktionen unterstützen und gleichzeitig die Rauschkopplung von Leistungsstufen zu digitalen Schaltungen minimieren.
Die PWM-Erzeugung erfordert Hardware-Timer mit Funktionen für komplementäre Ausgänge, Totzeiteinfügung und synchronisierte ADC-Triggerung. Die zentrierte PWM reduziert die Stromwelligkeit und ermöglicht ein Sampling in der Trägermitte für genaue Strommessungen. Die PWM-Auflösung und die Auswahl der Trägerfrequenz beeinflussen die erreichbare Steuerbandbreite und das hörbare Rauschen.
Die Ausführung des Regelalgorithmus erfolgt innerhalb der PWM-Zyklusperiode – typischerweise 50–100 μs für 10–20 kHz PWM. Die vollständige Sequenz von ADC-Sampling, Regelungsberechnung und PWM-Update muss innerhalb dieses Fensters mit deterministischem Timing abgeschlossen sein. Industriesteuerungs-PCB-Designs müssen Echtzeit-Leistungsanforderungen unterstützen.
Digitale Steuerungsarchitektur
- Prozessorauswahl: Motorsteuerungs-DSPs oder MCUs mit integrierten PWM-, ADC- und Encoder-Peripheriegeräten.
- PWM-Peripherie: Hardware unterstützt komplementäre Ausgänge, programmierbare Totzeit, Fehlereingänge und ADC-Trigger.
- ADC-Leistung: Mindestens 12-Bit-Auflösung; 1–2 μs Wandlungszeit für Stromkreisanwendungen.
- Encoder-Hardware: Quadratur-Decoder zählt ohne Softwareeingriff; Erfassungsfunktion Zeitstempel Indeximpulse.
- Kommunikationsschnittstelle: CAN, Ethernet oder Feldbus für Befehlseingabe und Diagnose.
- Watchdog und Fehler: Hardware-Watchdog und Fehlereingänge, die PWM unabhängig von Software deaktivieren.
Strategien für das Wärmemanagement
Motorsteuerungen verbrauchen Leistung in Schalt- und Leitungsverlusten, die je nach Last und Schaltfrequenz variieren. Das thermische Design muss sowohl den Dauerbetrieb bei Nennlast als auch vorübergehende Überlastbedingungen während des Motorstarts oder der Beschleunigung bewältigen.
Die Montage von Leistungshalbleitern bestimmt den thermischen Widerstand vom Übergang zur Umgebung. Auf PCB montierte Geräte verlassen sich auf Kupferverteilung und thermische Durchkontaktierungen, um Wärme abzuleiten; Designs mit höherer Leistung montieren Geräte auf Kühlkörpern oder Kühlplatten mit Wärmeleitmaterial. Das thermische PCB-Design muss innerhalb der Layoutbeschränkungen ausreichende thermische Pfade bereitstellen.
Motorsteuerungen arbeiten oft in geschlossenen Räumen – Motorgehäusen, Geräteschränken oder Fahrzeugabteilen –, in denen die Umgebungstemperatur 85 °C oder mehr erreichen kann. Komponentenauswahl und thermisches Design müssen diese erhöhten Umgebungstemperaturen berücksichtigen und gleichzeitig einen zuverlässigen Betrieb aufrechterhalten.
Elemente des thermischen Designs
- Thermischer Widerstandspfad: Entwurf des thermischen Widerstands von Übergang zu Umgebung im Einklang mit Verlustleistung und Temperaturgrenzen.
- Kupfergewicht: 2–4 oz Kupfer in Leistungsbereichen für Stromführung und thermische Verteilung.
- Thermische Via-Arrays: Via-Arrays unter Leistungspaketen reduzieren den thermischen Widerstand zu inneren Schichten.
- Kühlkörperintegration: Hochleistungsdesigns montieren Halbleiter über Wärmeleitmaterial auf externe Kühlkörper.
- Temperatursensorik: NTC-Thermistoren in der Nähe von Leistungsgeräten ermöglichen thermischen Schutz.
- Derating-Definition: Klare Angabe der Stromkapazität gegenüber der Umgebungstemperatur.
EMV-Konformitätsansätze
Motorsteuerungen erzeugen EMI durch Hochfrequenzschalten und strahlen durch Motorkabel, die als Antennen wirken. Die Erfüllung der EMV-Anforderungen umfasst Filterung, Abschirmung und Layouttechniken, die über die Leistungsstufe, die Steuerkreise und die Systemverbindungen hinweg koordiniert sind.
Die Filterung der leitungsgebundenen Emissionen am DC-Eingang verwendet Gleichtakt-Drosseln und Differenzkondensatoren, um Emissionen aus dem PWM-Schalten zu dämpfen. Das Filterdesign muss die erforderliche Dämpfung erreichen und gleichzeitig den Motorstrom ohne Sättigung bewältigen. Die EMV-Testprozesse überprüfen die Filterwirksamkeit über den Betriebsbereich.
Emissionen von Motorkabeln hängen von Schaltflankenraten, Kabellänge und Abschirmung ab. Ausgangsfilter (dV/dt oder Sinuswellenfilter) verlangsamen Ausgangsspannungsübergänge, um hochfrequente Inhalte zu reduzieren. Diese Filter schützen auch die Motorisolierung vor Spannungsspitzen, die bei langen Kabellängen auftreten.
EMV-Designansätze
- Eingangsfilterung: Mehrstufige Gleichtakt- und Gegentaktfilterung am DC- oder AC-Eingang.
- Ausgangs-dV/dt-Steuerung: dV/dt-Filter begrenzen den Anstiegs der Ausgangsspannung; reduzieren Motorlagerströme und EMI.
- Kabelabschirmung: Abgeschirmte Motorkabel mit ordnungsgemäßer Terminierung reduzieren abgestrahlte Emissionen.
- PWM-Frequenzauswahl: Vermeiden Sie PWM-Frequenzen, die Emissionen bei empfindlichen Empfängerfrequenzen erzeugen.
- Spread Spectrum: Spread Spectrum PWM reduziert Spitzenemissionen bei PWM-Frequenz und Oberwellen.
- Integrität der Massefläche: Durchgehende Masseflächen minimieren Schleifenbereiche und steuern Rückwege.
Zusammenfassung
Das Motorsteuerungs-PCB-Design gleicht Leistungshandhabungseffizienz, Regelgenauigkeit, Wärmemanagement und EMV-Konformität in Anwendungen von kompakten eingebetteten Antrieben bis hin zu voll ausgestatteten Industriesteuerungen aus. Die Grundprinzipien gelten unabhängig vom Umfang – Minimierung der Schaltkreisinduktivität, Aufrechterhaltung der Signalintegrität für Sensorik und Steuerung und Verwaltung thermischer Pfade für zuverlässigen Betrieb. Implementierungsdetails variieren je nach Leistungspegel, Motortyp und Anwendungsanforderungen, aber erfolgreiche Designs teilen die Aufmerksamkeit auf diese technischen Kernanliegen.